 |
|
МЕНЮ
|
Курсовая работа: Механізм приводу щокової дробаркиКурсовая работа: Механізм приводу щокової дробаркиКурсова робота З дисципліни: «Теорія машин і механізмів» На тему: «Механізм приводу щокової дробарки» Зміст Глава 1. Кінематичне дослідження шарнірно-важільного механізму 1. Структурний аналіз механізму 2. Кінематичне дослідження механізму Глава 2. Силове дослідження шарнірно-важільного механізму 1. Кінетостатичне дослідження механізму 2. Силове дослідження механізму першого класу Глава 3. Визначення моменту інерції маховика 1. Побудова графіка зведеного моменту сил опору 2. Побудова графіка робіт сил опору 3. Побудова графіка надлишкової роботи 4. Масштабні коефіцієнти побудови графіків 5. Побудова графіка зведених моментів інерції Ізв. 6. Побудова діаграми Віттенбауера 7. Визначення геометричних розмірів маховика Глава 4. Геометричний синтез зовнішнього евольвентного нульового прямозубого зачеплення 1. Визначення геометричних параметрів зубчастого зчеплення Глава 5. Синтез кулачкового механізму 1. Побудова графіка кутового переміщення штовхача 2. Порядок побудови кулачкового механізму з плоским штовхачем Література Глава 1. Кінематичне дослідження механізму1. Структурний аналіз механізму привід щокова дробарка штовхач Зображуємо структурну схему механізму.
Рис. 1 Нумеруємо ланки і позначаємо кінематичні пари. Складаємо таблицю кінематичних пар.
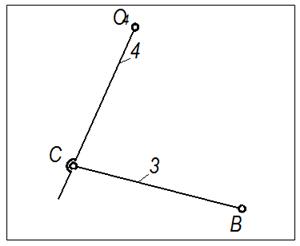
Знаходимо ступінь рухомості за формулою Чебишева: W = 3n-2p5-p4 = 3∙5-2∙7 = 1де n – число рухомих ланок;р5 – число кінематичних пар пятого класу; р4 – число кінематичних пар четвертого класу. Ділимо важільний механізм на групи Ассура. Виділяємо структурну групу з ланок 4 – 3. 1) n = 2; p5 = 3; 2)W=3×2–2×3=0; Група Асура 2 класа, 2 порядку, 2 виду.
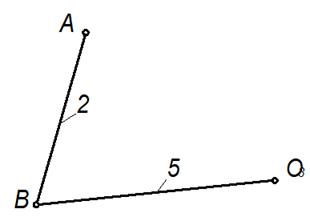
Рис.2 Виділяємо структурну групу з ланок 2 – 5. 1) n = 2; p5 = 3; 2) W = 3∙2 – 2∙3 = 0; Група Асура 2 класа, 2 порядку 1 виду.
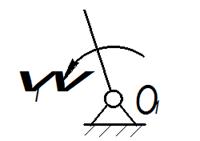
Рис. 3 Виділяємо механізм першого класу, який складається з ланок 0 – 1.
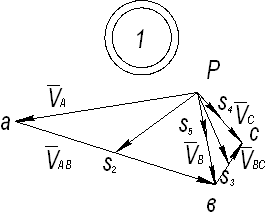
Рис. 4 В загальному, розглянутий механізм другого класу (за класом вищої групи Аcсура). Структурна формула даного важільного механізму: І1→ ІІ21→ II22 . 2. Кінематичне дослідження механізму Задачами кінематичного дослідження є побудова планів положень механізму, траекторій окремих точок, швидкостей і прискорень ланок механізму. Дані для кінематичного розрахунку ланок механізму. Розміри ланок важільного механізму : LOA=0,14 м ; LАВ=1,2 м ; LВС=1,2 м, LО4C=0,8 м ; LО3В=1,1м ; AS2= 0,5· AB = 0,5·1,2= 0,6 м, BS3= 0,5· BС = 0,5·1,2= 0,6 м, O4S4= 0,5· O4C = 0,5·0,8= 0,4 м ; wn-1=25; w1=13,4 c-1 . Знаходження масштаба плана побудови: mL = LOA /OA = 0,14/28= 0,00 м/мм . Побудова плану швидкостей важільного механізму (для полож. № 1).
Для прикладу побудуємо план швидкостей для першого положення механізму. Знаходимо швидкість точки А. VA =LOA ×w1 = 0,14×13,4 = 1,88 м/с . В довільному масштабі з довільної точки відкладаємо відрізок Рvа, що зображає швидкість точки А (перпендикулярно до кривошипа ОА в напрямку w1). Знаходимо масштаб побудови плана швидкостей: mv = Vа/(Рva) = 1,88/50 = 0,0376 (м/с)/мм . Для знаходження швидкості точки B запишемо систему векторних рівнянь: VB = VА + VBA; VB = VC + VВC . Точка b буде лежати на перетині лінії, яка проходить через точку a перпендикулярно до ланки OA, з лінією, що проходить через точку Рv перпендикулярно до ланки BC. Знаходимо дійсне значення швидкості ланок механізму: VО3В = (Рvb)×mv = 25,04×0,0376 = 0,94 м/с . VАВ = (ab)×mv = 56,72×0,0376 =2,13м/с . Знаходимо кутову швидкість обертання ланки O1A : ω2 = VАB/LВA = 2,13/1,2 =1,78рад/с . Аналогічно знаходимо кутові швидкості ланок ВС і ВD : ω 3 = VBC/LВC = 0,5/1,2 = 0,42рад/с . ω 4 = VС/LО4С = 0,69/0,8 = 086рад/с . ω 5 = VО3В/LО3В=0,94/1,1 = 0,85рад/с . Аналогічно будуємо плани швидкостей для інших положень мeханізму. Будуємо таблицю значень лінійних і кутових швидкостей ланок механізму: Значення лінійних та кутових швидкостей ланок механізму
Побудова плану прискорення важільного механізму (для положення № 8). |

Copyright © 2012 г.
При использовании материалов - ссылка на сайт обязательна.