 |
|
МЕНЮ
|
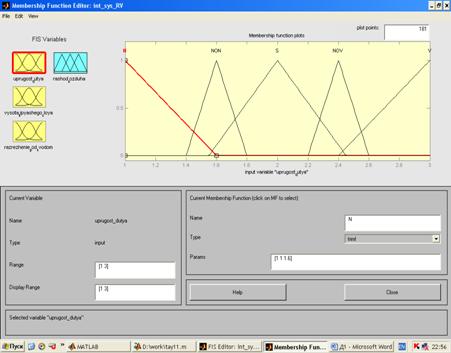
Дипломная работа: Технология обжига цинковых концентратов в печи кипящего слояПРАВИЛО-9: ЕСЛИ "упругость дутья низкая" И "высота кипящего слоя высокая" И "разрежение под сводом высокое" ТО "расход воздуха не очень высокий" ПРАВИЛО-10: ЕСЛИ "упругость дутья средняя" И "высота кипящего слоя низкая" И "разрежение под сводом низкое" ТО "расход воздуха не очень низкий" ПРАВИЛО-11: ЕСЛИ "упругость дутья средняя" И "высота кипящего слоя низкая" И "разрежение под сводом среднее" ТО "расход воздуха средний" ПРАВИЛО-12: ЕСЛИ "упругость дутья средняя" И "высота кипящего слоя низкая" И "разрежение под сводом высокое" ТО "расход воздуха не очень высокий" ПРАВИЛО-13: ЕСЛИ "упругость дутья средняя" И "высота кипящего слоя средняя" И "разрежение под сводом низкое" ТО "расход воздуха не очень низкий" ПРАВИЛО-14: ЕСЛИ "упругость дутья средняя" И "высота кипящего слоя средняя" И "разрежение под сводом среднее" ТО "расход воздуха средний" ПРАВИЛО-15: ЕСЛИ "упругость дутья средняя" И "высота кипящего слоя средняя" И "разрежение под сводом высокое" ТО "расход воздуха не очень высокий" ПРАВИЛО-16: ЕСЛИ "упругость дутья средняя" И "высота кипящего слоя высокая" И "разрежение под сводом низкое" ТО "расход воздуха низкий" ПРАВИЛО-17: ЕСЛИ "упругость дутья средняя" И "высота кипящего слоя высокая" И "разрежение под сводом среднее" ТО "расход воздуха средний" ПРАВИЛО-18: ЕСЛИ "упругость дутья средняя" И "высота кипящего слоя высокая" И "разрежение под сводом высокое" ТО "расход воздуха не очень высокий" ПРАВИЛО-19: ЕСЛИ "упругость дутья высокая" И "высота кипящего слоя низкая" И "разрежение под сводом низкое" ТО "расход воздуха низкий" ПРАВИЛО-20: ЕСЛИ "упругость дутья высокая" И "высота кипящего слоя низкая" И "разрежение под сводом среднее" ТО "расход воздуха низкий" ПРАВИЛО-21: ЕСЛИ "упругость дутья высокая" И "высота кипящего слоя низкая" И "разрежение под сводом высокое" ТО "расход воздуха не очень высокий" ПРАВИЛО-22: ЕСЛИ "упругость дутья высокая" И "высота кипящего слоя средняя" И "разрежение под сводом низкое" ТО "расход воздуха средний" ПРАВИЛО-23: ЕСЛИ "упругость дутья высокая" И "высота кипящего слоя средняя" И "разрежение под сводом среднее" ТО "расход воздуха не очень низкий" ПРАВИЛО-24: ЕСЛИ "упругость дутья высокая" И "высота кипящего слоя средняя" И "разрежение под сводом высокое" ТО "расход воздуха не очень низкий" ПРАВИЛО-25: ЕСЛИ "упругость дутья высокая" И "высота кипящего слоя высокая" И "разрежение под сводом низкое" ТО "расход воздуха очень низкий" ПРАВИЛО-26: ЕСЛИ "упругость дутья высокая" И "высота кипящего слоя высокая" И "разрежение под сводом среднее" ТО "расход воздуха низкий" ПРАВИЛО-27: ЕСЛИ "упругость дутья высокая" И "высота кипящего слоя высокая" И "разрежение под сводом высокое" ТО "расход воздуха не очень низкий" 2.6.3 Исследование нечеткой модели управленияВ качестве терм-множества трех входных лингвистических переменных используется множество {"низкая", "средняя", "высокая"}, которое записывается в символическом виде {N, S,V}. В качестве терм-множества выходной лингвистической переменной используется множество ("очень низкий", "низкий", "не очень низкий", "средний", "не очень высокий", "высокий"), которое записывается в символическом виде {ON,N,NON,S,NOV,V,OV}. Разработку нечеткой модели (int_sys_rv) будем выполнять с использованием графических средств системы Matlab. В редакторе FIS определяем три входные переменные с именами "упругость дутья" (uprugost_dutya), высота кипящего слоя (vysota_kipyashego_sloya) и разрежение под сводом (razrezhenie_pod_svodom) и одну выходную переменную с именем расход воздуха (rashod_vozduha). Определяем функции принадлежности термов для каждой из переменных системы нечеткого вывода. Для этой цели воспользуемся редактором функций принадлежности системы Matlab. Вид графического интерфейса редактора функций принадлежности на рисунке 11 и 12.
Рис.11. Графический интерфейс редактора функций принадлежности после задания первой входной переменной
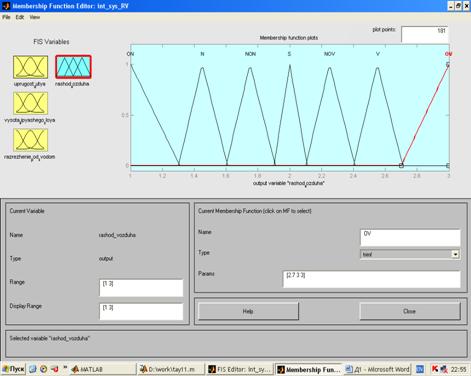
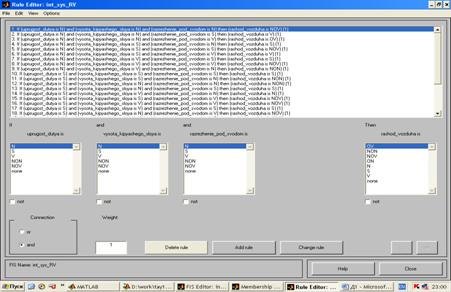
Рис.12. Графический интерфейс редактора функций принадлежности после задания выходной переменной Теперь зададим 27 правил для разрабатываемой системы нечеткого вывода (рис.13).
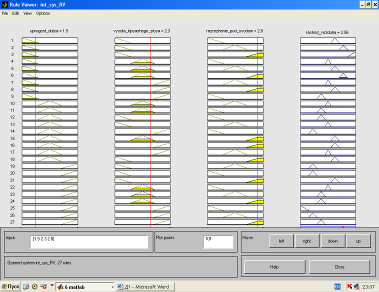
Рис.13. Графический интерфейс редактора правил после задания базы правил для данной системы нечеткого вывода Теперь можно выполнить оценку построенной системы нечеткого вывода для задачи автоматического управления расходом воздуха. Для этого откроем программу просмотра правил системы Matlab и введем значения входных переменных для частного случая, когда упругость дутья равна 1,5, высота кипящего слоя 2,3 и разрежение под сводом 2,8. Процедура нечеткого вывода, выполненная системой Matlab для разработанной нечеткой модели, выдает в результате значение выходной переменной "расход воздуха", равное 2,56 (рис.14).
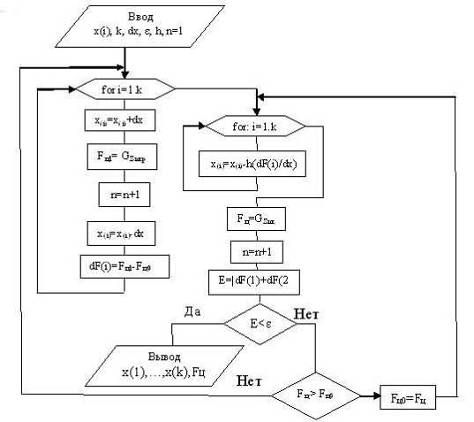
Рис.14. Графический интерфейс программы просмотра правил после выполнения процедуры нечеткого вывода Данное значение соответствует высокому расходу воздуха. Также если значения входных переменных будут определяться как "не очень низкая" или "не очень высокая", которые мы не определяли в правилах, результат соответствует тому значению выходной переменной, которая на практике ведения процесса бывает в таких случаях. В данном случае сравнение результатов нечеткого вывода для этих значений входных переменных, полученных на основе численных расчетов и с помощью разработанной нечеткой модели, также показывает согласованность модели и подтверждает ее адекватность (при проверке в "ручном" режиме). Аналогично разрабатываются нечеткие модели управления расходом кислорода, выгрузкой материала и "всасом" дымососа. 2.7 Разработка АСУТП процесса обжига в КСПолученные в п. п.2.4, 2.5 и 2.6 результаты исследований по синтезу подсистемы оптимального управления, подсистемы стабилизации температуры в слое и интеллектуальной подсистемы легли в основу проектирования АСУТП процессом обжига цинковых концентратов в печах кипящего слоя. Для нормального функционирования АСУТП и в соответствии с ГОСТами необходимо разработать техническую документацию, включающую в себя следующие элементы: информационное обеспечение АСУТП, организационное обеспечение АСУТП, алгоритмическое и программное обеспечения АСУТП, техническое обеспечение АСУТП. 2.7.1 Информационное обеспечение АСУТПВыбор структуры и состава информационного обеспечения системы основан на обработке данных технологического процесса с применением средств вычислительной техники и разработки единой системы классификации и кодирования исходной информации. Основной целью создания информационного обеспечения является обеспечение возможности анализа состояния объекта управления и принятия управляющих решений в нормальных и экспериментальных ситуациях. Назначение информационной системы состоит в измерении значений контролируемых параметров, передачи этой информации к месту обработки, ее первичной обработки и представления в местах использования информации для решения задач управления технологическим процессом обжига цинковых концентратов в печи КС. Информационное обеспечение должно отвечать ряду требований: своевременность доставки информации; достоверность передачи (отсутствие потерь и искажений в каналах связи и обработки); надежность функционирования информационной подсистемы; единство времени в системе распределения информации при выдаче форм выходной документации в соответствии со временем опроса соответствующих датчиков; возможность технической реализации. Кроме того, состав и структура информационного обеспечения должны обеспечивать: регулирование информационных потоков, обеспечивающее равномерную загрузку комплекса технических средств (КТС), а также своевременное представление информации обслуживающему и управленческому персоналу; возможность расширения системы посредством включения новых систем и расширение существующей; удобство участия человека в анализе ситуаций и управления технологическим процессом как в нормальных условиях, так и в аварийных ситуациях. Состав информационного обеспечения представляет собой совокупность системы классификации и кодирования, системы показателей (перечень входных и выходных сигналов), систем документации массивов информации (файлов), используемые в системе управления. Для контроля и управления процессом обжига цинкового концентрата в печи кипящего слоя, кодированию и вводу в управляющий вычислительный комплекс подлежат следующие технические переменные: Температура слоя печи "КС"; Температура под сводом печи; Температура перед циклонами, после 1 и 2 ступени циклонов; Температура отходящих газов на входе в электрофильтр; Температура газов на выходе из электрофильтра; Расход воздушно-кислородного дутья; Расход воздуха на аэрохолодильник; Расход воздуха на форкамеру; Расход кислорода на печь; Расход питательной воды; Содержание кислорода в дутье; Упругость дутья; Разрежение под сводом; Разрежение на входе в электрофильтр; Разрежение на выходе из электрофильтра; Давление питательной воды; Давление в барабане-сепараторе; Уровень в барабане сепараторе. Выходные управляющие воздействия по контурам управления: Расхода воды; Расхода воздуха; Расхода концентрата. В соответствии с этой информацией в параграфе 2.7.4 выбираем технические средства: датчики, преобразователи, показывающие приборы и структуру УВК. 2.7.2 Организационное обеспечение АСУТППроизводственный персонал подразделением АСУТП включает ремонтную и эксплуатационную службы, организованные иерархическим образом с оперативной взаимосвязью служб на всех уровнях. Ремонтный персонал на нижнем уровне организуется в отдельные межсистемные группы по видам работ и видам технических средств, а именно группу ремонта, группу обслуживания УВК и группу математических методов и программирования. Эксплуатационный персонал организован по технологическим участкам для контроля и управления технологическими процессами на верхних участках системы и подсистемы АСУТП включает: · оператора УВК; · дежурного оператора КИП и А; · группу отделения обжига. На следующем уровне организационной структуры выделен начальник, мастер-технолог смены. Два верхних уровня представлены начальником подразделения АСУТП, начальником металлургического цеха, которые оперативно связаны между собой для согласования работ по отдельным подразделениям с подчинением начальнику научно-исследовательского отдела (НИО), начальнику производственно - технического отдела (ПТО) и главному инженеру УК МК, причем административная иерархия НИО включает по уровням: начальника НИО, начальников подразделений АСУТП и начальников лаборатории, мастера КИП и А, начальника отделения теплотехники и начальника смены. На нижнем уровне начальник УВК с подчинением ему группы математических методов и программирования, группы обслуживания УВК, группы ремонта, оператора УВК и дежурного оператора КИП и А. АСУТП ПУ ОЦК работает в информационном режиме и осуществляет: централизованный сбор; переработку и представление информации в форме, максимально облегчающей оперативное управление технологическими процессами объекта; централизованный непрерывный контроль технологических параметров; сигнализацию, регистрацию отклонений заданных параметров и различных нарушений технологических процессов; централизованный непрерывный контроль сменных результатов работы; формирование и оперативную печать информации о ходе кампании; оперативное информационное обслуживание руководства завода и НИО. Оператор административно подчинен начальнику смены и оперативно связан со старшим мастером, начальником цеха и с заведующим отделения теплотехники и группы отделения обжига. Оператор выполняет следующие основные функции: поддерживает заданный старшим мастером технологический режим; осуществляет пуск, переключение режимов работы и остановки оборудования; контролирует выполнение производственной программы; осуществляет вызов интересующей его технологической информации; производит ввод с пульта оператора в УВК новых значений параметров технологического режима по указанию старшего мастера, начальника отдела теплотехники и начальника смены; ведет учет нарушений технологических режимов, выясняет причины нарушений; выявляет "узкие места" и принимает совместно со старшим мастером отделения оперативные меры по их немедленному устранению; обеспечивает формирование достоверной отчетной информации и регулярность подачи ее на верхние уровни. 2.7.3 Алгоритмическое и программное обеспечения АСУТПАлгоритм нахождения экстремума целевой функции методом наискорейшего спуска Алгоритм включает следующие предписания (рис.15): вводятся исходные данные, x (i) которые определятся из математической модели [5], количество входных переменных x (i) - k, величина шага-h, заданной точности поиска-ε, значения величины изменения аргумента при нахождения частных производных-dx, cчетчик шагов в начальный момент должен быть равен единице (n=1), так как до начала итерационных процедур требуется один раз рассчитать функцию цели-Fц0=GZnкр, которая определяется из математической модели [1]; производится расчет частных производных, для чего осуществляется организация цикла попеременного расчета частных производных k-мерной функции (i=1,k); производится поочередное изменение аргумента x (i) на величину - dx; производится расчет целевой функции при измененном аргументе - Fц1, а счетчик - n увеличивает свое значение на единицу; рассчитывается и запоминаются величины изменения функции - dF (i), для соответствующей i-ой координаты, осуществляется возврат в исходную точку i-ой координаты: x (i) - dx, после завершения расчета частной производной по-х (1) производятся аналогичные действия по другим; рассчитываются изменения x (i), противоположно направлению градиента, в соответствии со стратегией (37), где dF (i) /dx - есть частная производная по i-ой координате; производится расчет функции цели в новой точке, а счетчик шагов увеличивается еще на одну единицу; производится расчет критерия окончания поиска - Е; осуществляется сравнение величины критерии Е с заданной точностью ε, если значение Е достигло заданной точности, то выводятся результаты поиска, в противном случае происходит сравнение вновь рассчитанного значения целевой функции F с ее значением на предыдущем шаге - Fц0. Так как метод ищет минимум, а нам нужно максимальное значение Fц0=GZnкр, шаг считается удачным и продолжается поиск вдоль прежнего направления градиента, производится переприсвоение нового значения функции цели переменной - Fц0, если новое значение целевой функции больше предыдущего. В случае неудачи, производится поиск нового направления градиента. Программа реализации алгоритма метода наискорейшего спуска: function f=mns (x1,.,xk,k,dx,e,h,n=1) n=1; x (1) =x1. x (k) =xk; Fц0= GZnкр; flag1=1; while flag1==1 for i=1: 2 x (i) =x (i) +dx; Fц1= GZnкр; n=n+1; x (i) =x (i) - dx; dF (i) =F1-F0; end flag2=1; while flag2==1 for i=1: 2 x (i) =x (i) - h* (dF (i) /dx); end Fц=GZnкр; n=n+1; E=abs (dF (1) +dF (2)); if E>e if Fц>Fц0 F=F0; flag2=1; else flag2=0; flag1=1; end flag1=0; end end Otvx1=x (1) Otvxk=x (k) OtvF= Fц end
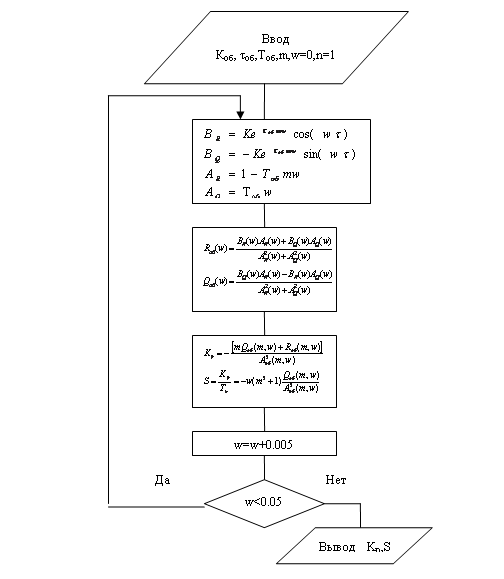
Рис.15. Блок-схема алгоритма поиска методом наискорейшего спуска Алгоритм расчета параметров настройки регулятора Алгоритм включает следующие предписания (рис.16): - вводятся значения Коб, τоб, Тоб,m,w=0; - вычисляются значения вещественного и мнимого составляющего числителя и знаменателя передаточной функций объекта регулирования BR, BQ, AR, AQ; - вычисляются значения вещественной и мнимой части АФХ объекта Rоб, Qоб; - вычисляются значения настроечных параметров регулятора Кр, S и выводятся результаты; - дается приращение значению частоты w=w+0.005; - вычисления производятся для каждого нового значения частоты пока оно не равно 0,05; - выводятся результаты вычислений Кр, S, w. По значениям Кр и S для каждого w [0: 0.05,0.005] строятся
линии равные степени затухания m=0, m=0.366
(см раздел по разработке системы стабилизации рисунок 8) и выбирается точка, соответствующая
оптимальным значениям Программа реализации данной блок-схемы на Matlab: function S_K (k,t,m,T,w) n=1; while w<0.05 Br=k*exp (t*m*w) *cos (t*w); Bq=-k*exp (t*m*w) *sin (t*w); Ar=1-T*m*w; Aq=T*w; R= (Br*Ar+Bq*Aq) / (Ar^2+Aq^2); Q= (Bq*Ar-Br*Aq) / (Ar^2+Aq^2); K=- (m*Q+R) / (R^2+Q^2); S=-w* (m^2+1) *Q/ (R^2+Q^2); masK=K; masS=S; w=w+0.005; n=n+1; K S hold on plot (masK,masS) w end Kp=K Sp=S
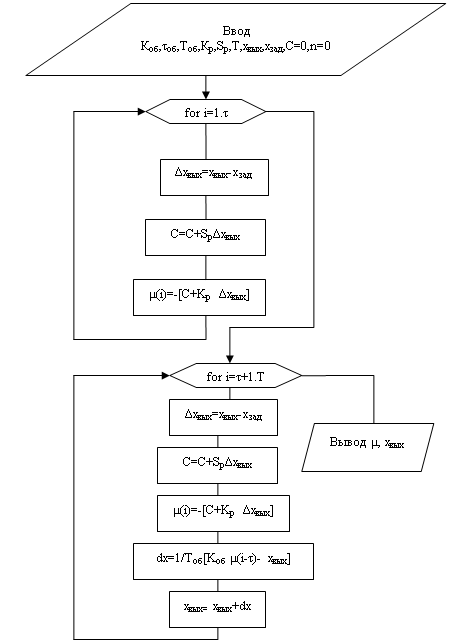
Рис.16. Блок схема алгоритма нахождения значений настроек регулятора Алгоритм расчета переходного процесса Алгоритм включает следующие предписания (рис.17): - вводятся значения Коб,τоб, Тоб, Кр,Sр, Т, хвых, хзад, С=0,n=0; - вычисляется значение отклонения регулируемой величины Δхвых; - значение управляющего воздействия μ за время запаздывания τ объекта; - вычисляются значения управляющего воздействия μ и выходной переменной объекта хвых на каждом моменте времени до времени Т, пока установится процесс, т.е. значение выходной переменной не станет приблизительно равной значению хзад. По результатам вычислений строится переходная характеристика процесса (см раздел по разработке системы стабилизации рис.9). Программа реализации данного алгоритма на Matlab: function per_pro (y,yz,T,dt,r) a= [1: p]; k=2.5; K=0.68; S=0.016; T=60; t=26; C=0; i=1; while i<=t n=0; dy=y-yz; while n<r C=C+S*dy*dt; n=n+1; end m (i) =- (C+K*dy); y1 (i) =y i=i+1; end for i=t+1: p n=0; dy=y-yz; while n<r C=C+S*dy*dt; n=n+1; end m (i) =- (C+K*dy); n=0; while n<r Dy=1/T* (k*m (i-t) - y) *dt; y=y+Dy; n=n+1; end y1 (i) =y i=i+1; m; y1; end plot (a,y1) end
Техническое обеспечение должно полностью удовлетворять требованиям, обеспечивающим достижения тех целей управления, которые были сформулированы в п. п.2.4, 2.5 и 2.6, а также общепринятым в цветной металлургии требованиям, которые были сформулированы в п. п.2.7.1, 2.7.2 и 2.7.3. В связи с тем, что структура системы управления (рис.4) предусматривает решение задач верхнего (задачи оптимизации и интеллектуальная подсистема) уровня, а также включает задачи нижнего уровня (стабилизация температуры в слое, расходов материалов, давлений и т.д.) в составе технического обеспечения АСУТП используется два управляющих компьютера. Для обеспечения решения задач планирования работы цеха, программ организационной подсистемы, а также подсистем оптимального управления и интеллектуальной подсистемы применяется управляющая вычислительная машина - УВМ. Для решения задач оперативного управления нижнего уровня нами предполагается использование управляющего контроллера. В автоматизированной системе управления нижнего уровня в качестве технической базы управляющей части системы автоматизации выбран программируемый логический контроллер Simatic S7-300 с центральным процессором CPU 315-2DP. Контроллер полностью отвечает требованиям концепции “Totally Integrated Automation”. Страницы: 1, 2, 3, 4, 5, 6, 7, 8, 9 |
Copyright © 2012 г.
При использовании материалов - ссылка на сайт обязательна.