 |
|
МЕНЮ
|
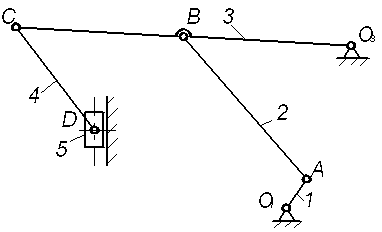
Курсовая работа: Механізм приводу поршневого насосуКурсовая работа: Механізм приводу поршневого насосуКурсовий проект з теорії машин і механізмів на тему: Механізм приводу поршневого насосу1. Силове дослідження механізмуСтруктурний аналіз Зображуємо структурну схему механізму.
Рис. 1 Номеруємо ланки і позначаємо кінематичні пари. Складаємо таблицю кінематичних пар. Таблиця 1. Кінематичнi пари
Знаходимо ступінь рухомості за формулою Чебишева: W = 3n-2p5-p4 = 3∙5-2∙7 = 1де n – число рухомих ланок;р5 – число кінематичних пар пятого класу; р4 – число кінематичних пар четвертого класу. Ділимо важільний механізм на групи Ассура. Виділяємо структурну групу з ланок 4 – 5.
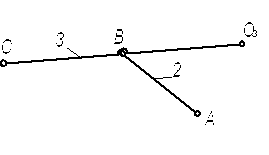
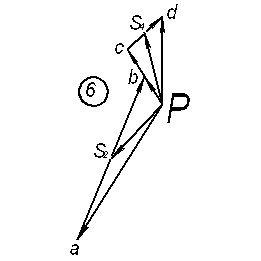
Рис.2 1) = 2; p5 = 3; 2) W = 3×2 – 2×3 = 0; Група Асура 2 класа, 2 порядку, 2 виду. Виділяємо структурну групу з ланок 2 – 3. 1) n = 2; p5 = 3; 2) W = 3∙2 – 2∙3 = 0; Група Асура 2 класа, 2 порядку, 1 виду. Рис. 3 Виділяємо механізм першого класу, який складається з ланок 0 – 1. В загальному, розглянутий механізм другого класу (за класом вищої групи Асура). 1.1 Кінематичне дослідження Задачами кінематичного дослідження є побудова планів положень механізму, траекторій окремих точок, швидкостей і прискорень ланок механізму. Дані для кінематичного розрахунку ланок механізму. Розміри ланок важільного механізму : LOA=0,17 м ; LАВ=1.4 м ; LСD=1,33 м, LО3C=3,2; LО3В=1,6м ; wn-1=1,8; w1=(R2\R1) ·wn-1=(157,5/72) ·1,8=3,94 c-1 . Знаходження масштаба плана побудови: mL = LOA /OA = 0.17/17 = 0.01м/мм . Побудова плану швидкостей важільного механізму Для прикладу побудуємо план швидкостей для шостого положення механізму. Рис. 5 (для положення № 6). Знаходимо швидкість точки А. VA =LOA ×w1 = 0,17×3,94 = 0,67м/с . В довільному масштабі з довільної точки відкладаємо відрізок Рvа, що зображає швидкість точки А (перпендикулярно до кривошипа ОА в напрямку w1). Знаходимо масштаб побудови плана швидкостей: mv = Vа/(Рva) = 0.67/67 = 0.01 (м/с)/мм . Для знаходження швидкості точки B запишемо систему векторних рівнянь: VB = VА + VBA; VB = VC + VВC . Точка b буде лежати на перетині лінії, яка проходить через точку a перпендикулярно до ланки OA, з лінією, що проходить через точку Рv перпендикулярно до ланки BC.
Рис. 5 Знаходимо дійсне значення швидкості ланок механізму: VО3В = (Рvb)×mv = 13,83×0,01 =0,14 м/с . VО3С = (Рvc)×mv = 27,66×0,01 =0,28 м/с VАВ = (ab)×mv = 74,02×0,01 =0,74 м/с VСD = (cd)×mv = 20,17×0,01 =0,2 м/с . VD = (Рvd)×mv = 37,02×0,01 =0,37м/с . Знаходимо кутову швидкість обертання ланки O1A : w2 = VАB/LВA = 0,74/1,4 = 0,53 рад/с . Аналогічно знаходимо кутові швидкості ланок ВС і ВD : w3 = VО3С/LО3С = 0,28/3,2 = 0,09 рад/с . w4 = VСD/LСD = 0,2 /1,33 = 0,15 рад/с . Аналогічно будуємо плани швидкостей для інших положень мeханізму. Будуємо таблицю значень лінійних і кутових швидкостей ланок механізму: Таблиця 2. Значення лінійних швидкостей ланок механізму
Таблиця 3. Значення кутових швидкостейланок механізму |

Copyright © 2012 г.
При использовании материалов - ссылка на сайт обязательна.