 |
|
МЕНЮ
|
Курсовая работа: Проектирование и исследование механизмов компрессора2.3 Построение планов ускорений Определяем ускорение точки а кривошипа 1, совершающего вращательное движение:
Принимаем длину
масштабного отрезка, изображающего ускорение точки А
Принимаем Пересчитываем значение масштабного отрезка:
Ускорение точки В считается по формулам:
Решаем это уравнение графически. Используя условие подобия одноименных фигур плана ускорений и плана механизма находим положение точки C на плане ускорений. Ускорение точки D считается по формуле:
Решаем это уравнение графически. Рассчитываем ускорения:
Рассчитываем угловые ускорения звеньев:
Полученные данные заносим в таблицу 2.2. Таблица 2.2 Ускорения точек и угловые ускорения звеньев
3. Динамический анализ и синтез машинного агрегата 3.1 Динамическая модель машинного агрегата Основным условием синтеза
машинного агрегата является обеспечение заданной неравномерности движения Конструктивно эта задача решается с помощью установки маховика. В результате решения задачи синтеза определяется: 1- необходимый момент инерции маховика; 2- размеры маховика; 3- место установки маховика. Для упрощения решения
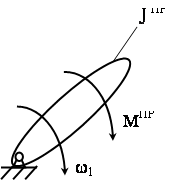
задач синтеза механизм заменяется его расчетной динамической моделью (рис.3.1.).
Эта модель представляет собой твердое тело, обладающее некоторым моментом
инерции
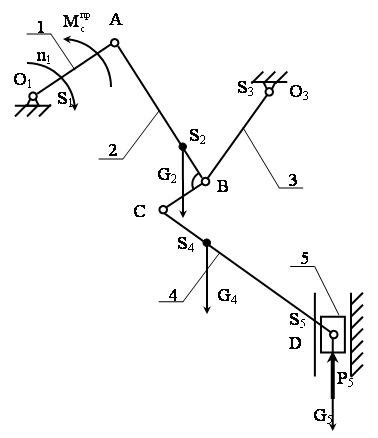
Рис. 3.1. Динамическая модель машинного агрегата 3.2 Построение графика приведенного момента сил сопротивления Схема механизма с приложенными к ней силами показана на рисунке 3.2.
Рис.3.2 Схема механизма с приложенными силами На звенья механизма действуют следующие силы: 1. Силы тяжести звеньев
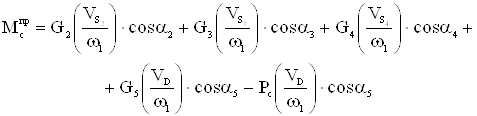
2. Момент сил сопротивления. Приведенный момент сил сопротивления рассчитываем по формуле:
углы Индикаторная диаграмма, показывающая давление газов в цилиндре изображена на рисунке 3.3.
Рис. 3.3 Индикаторная диаграмма Исходные данные для расчета и значения приведенного момента сил сопротивления заносим в таблицу 3.1. Таблица 3.1 Расчет приведенного момента сил сопротивления
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||

 .
. ,
,  ;
; ;
; ;
;
 , т.к.
, т.к. 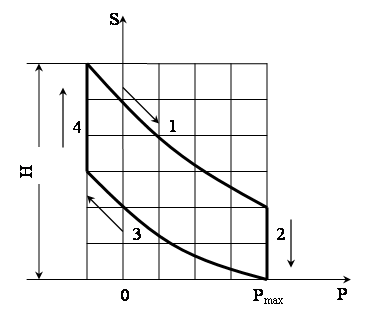
Copyright © 2012 г.
При использовании материалов - ссылка на сайт обязательна.