 |
|
МЕНЮ
|
Курсовая работа: Автоматизация процесса заточки угла в плане сверл с подробной разработкой принципиальной структурной схемы и конструкции устройства шпиндельного узлаКурсовая работа: Автоматизация процесса заточки угла в плане сверл с подробной разработкой принципиальной структурной схемы и конструкции устройства шпиндельного узлаМинистерство высшего образования Ижевский Государственный Технический Университет Воткинский филиал Кафедра: "Технология машиностроения и приборостроения" КУРСОВОЙ ПРОЕКТ По курсу: "Автоматизация производственных процессов" На тему: "Автоматизация процесса заточки угла в плане сверл с подробной разработкой принципиальной структурной схемы и конструкции устройства шпиндельного узла" Выполнил:студент гр.Т-911 Лаптева Н.В Проверил: Иванов В.В. Содержание Введение Анализ автоматизируемого технологического процесса Разработка перечня основных функций устройства. Функциональный анализ Выбор исполнительных механизмов Выбор приводов исполнительных механизмов и датчиков Цикл работы устройства Описание работы автомата для заточки угла в плане спиральных сверл Расчет усилия закрепления сверла в цанговом патроне Заключение Литература Введение Автоматизация производственных процессов есть комплекс мероприятий по разработке новых прогрессивных технологических процессов и проектированию на их основе высокопроизводительного технологического оборудования, осуществляющего рабочие и вспомогательные процессы без непосредственного участия человека. Автоматизация — это комплексная конструкторско-технологическая задача создания принципиально новой техники на базе прогрессивных технологических процессов обработки, контроля, сборки. Она включает создание таких методов и схем обработки, конструкций и компоновок машин и систем машин, которые были бы невозможны, если бы человек по-прежнему оставался непосредственным участником технологического процесса. Любую продукцию, для получения которой известны методы и маршруты обработки, наиболее просто можно получить на универсальном неавтоматизированном оборудовании с ручным управлением при непосредственном участии человека. Автоматизация производственных процессов имеет цель — повышение производительности и качества выпускаемой продукции, сокращение количества обслуживающих рабочих по сравнению с неавтоматизированным производством. За счет реализации этих факторов обеспечивается экономический эффект и окупаемость затрат на автоматизацию. При этом важнейшим определяющим фактором успешного внедрения является надежность автоматизированного оборудования. Если показатели надежности оказываются низкими, сложнейшие и технически совершенные автоматические системы машин становятся менее производительными, чем неавтоматизированное оборудование; число же рабочих после автоматизации не сокращается, а возрастает. Поэтому важнейшим требованием к специалистам, работающим в области автоматизации машиностроения, является умение правильно оценивать целесообразную степень автоматизации в данных конкретных условиях, выбирать и рассчитывать оптимальные варианты построения машин и систем машин. Это не может быть правильно выполнено без наличия специальных знаний, которые, как правило, не даются в общих курсах по технологии и конструированию; поэтому во всех вузах созданы специальные курсы по автоматизации производственных процессов. Уровень и способы автоматизации зависят от вида производства его серийности, оснащенности техническими средствами. Автоматизация и механизация получили наибольшее распространение в массовом и крупносерийном видах производства. Анализ автоматизируемого технологического процесса Целью данного КП является разработка автоматизированного процесса заточки угла в плане сверл с подробной разработкой шпиндельного узла.
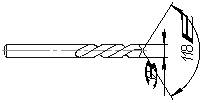
Для заточки сверл существуют абразивные и безабразивные методы. К безабразивным относятся анодно-механические, электроискровые и ультразвуковые. Анодно-механическая обработка основана на снятии слоя, образующегося в электролите на поверхности сверла, включенного в качестве анода. Недостаточная технологическая изученность этих процессов на первых стадиях внедрения в промышленность привела к появлению неправильных представлений об их технологических возможностях, затруднив распространение этих прогрессивных методов. Недостатками обычной анодно-механической заточки являлось возникновение сетки трещин на затачиваемых инструментах при высокопроизводительных режимах обработки и невозможность получения наиболее высоких классов чистоты поверхности. При электроискровом способе заточки затачиваемый инструмент подключен к одному полюсу, а вращающийся диск — к другому. Диск и сверло помещают в ванну с диэлектриком (минеральное масло с температурой вспышки не ниже 180°) или диэлектрик подается в место их контакта. Диск делается из меди, латуни или чугуна. Источником служит генератор постоянного тока, заряжающий обкладки конденсатора. При сближении диска и сверла между их выступающими частями происходят электрические разряды за счет запасенной в конденсаторе энергии, в результате чего выступы (шероховатости) затачиваемой поверхности постепенно разрушаются. Электроискровая обработка не нашла широкого применения при заточке инструмента из-за сложности оборудования. В процессе ультразвуковой обработки поверхностного слоя материала происходит его пластическое деформирование при высокочастотном виброударном воздействии инструмента, который движется вдоль поверхности. При этом изменяется как геометрия (чистота) самой поверхности, так и структура тонких поверхностных и приповерхностных слоев материала, в которых возникают слои упорядоченных наноструктур. Существующие технологии ультразвуковой обработки материалов оказываются малоэффективным из-за высокой энергоемкости, малых скоростей обработки и других факторов. В данном курсовом проекте будет рассмотрен способ заточки сверл эльборовыми кругами формы ПП по ГОСТ 2424-83. Разработка перечня основных функций устройства. Функциональный анализ Произведем составление перечня основных функций устройства, необходимых для реализации технического процесса. Для каждой функции формулируются требования, предлагаются и рассматриваются варианты устройств, позволяющих наиболее рационально осуществить заданную функцию, производится анализ их относительных преимуществ.
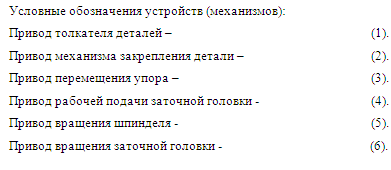
шпиндельный узел цанговый патрон сверло заточка Выбор исполнительных механизмовВ результате проведенного функционального анализа, производится окончательный выбор исполнительных механизмов. 1. Сверла помещаются и ориентируются в специальный магазин вручную по 50 штук. 2. Подача сверла из магазина на рабочую позицию осуществляется толкателем. 3. Закрепление детали на рабочей позиции производится в цанговом патроне, оснащённом механизмом автоматического зажима-разжима. 4. Заточка сверл осуществляется специальной заточной головкой, оснащённой устройством рабочей подачи. 5. Эвакуация заточенных сверл производится автоматически толкателем на ленточный конвейер. Выбор приводов исполнительных механизмов и датчиков Для каждого механизма, в соответствии с условиями его работы, выбираются соответствующие приводы. 1) Для механизма разжима сверла выбираем гидропривод, т.к. он обеспечивает необходимое усилие закрепления детали (закрепление в патроне осуществляется за счёт упругих сил пружины). 2) Для привода вращения шпинделя выбираем трёхфазный асинхронный электродвигатель, т.к. он обеспечивает необходимые величины крутящего момента и частоту вращения шпинделя. 3) Для привода конвейера выбираем трёхфазный асинхронный электродвигатель, т.к. он обеспечивает необходимые величины крутящего момента и скорость перемещения ленты. 4) Для привода толкателя выбираем гидропривод, т.к. он обеспечивает необходимое усилие перемещения шибера. 5)Для привода рабочей подачи заточной головки выбираем гидропривод, т.к. он обеспечивает необходимые скорость и усилие подачи. 6) Для привода упора выбираем гидропривод, т.к. он обеспечивает необходимую скорость перемещения упора. Датчики 1) х1, х2 – датчик начального и конечного положений толкателя деталей. 2) х3, х4 - датчики начального и конечного положения механизма закрепления деталей. 3) х5, х6 – датчики начального и конечного положения упора. 4) х7, х8 – датчики начального и конечного положения привода рабочей подачи заточной головки. 5) х9 – датчик вращения шпинделя. 6) х10 – датчик вращения круга заточной головки. 7) х11 – датчик наличия деталей в магазине. 8) х12 – датчик перемещения сверла на рабочую позицию (в упоре). Цикл работы устройства
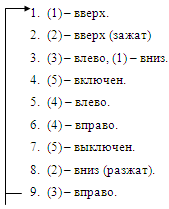
Исходное положение: (1) – в крайнем нижнем. (2) – в крайнем нижнем (разжат). (3) – в крайнем правом. (4) – в крайнем правом. (5) – выключен. (6) – постоянно вращается. Цикл работы:
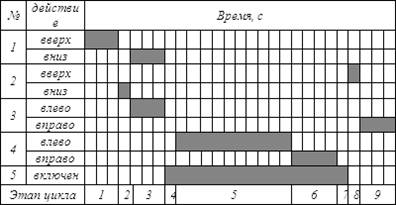
Циклограмма работы автомата.
Описание работы автомата для заточки угла в плане спиральных сверл Автомат состоит из магазина с толкателем, шпинделя, оснащённого цанговым патроном, заточной головки, подводимого упора. Сверла устанавливаются и ориентируются в магазине вручную по 50 штук. Подача из магазина осуществляется специальным ножевым толкателем, который захватывает только одно сверло (остальные скатываются). Магазин установлен под углом. После того как сверло подведено к выходному окну магазина, оно под действием силы тяжести соскальзывает с призмы ножа и перемещается в направляющий рукав, по которому скатывается в шпиндель. Сверло останавливается в цанговом патроне после касания вершиной поверхности упора, в которой установлен специальный датчик, по сигналу которого продолжается цикл обработки. Цанговый патрон сжимается (специальный толкатель отводит наконечник от тяги в виде кольца). После того, как сверло зажато в цанговом патроне, подводимый упор отводится из рабочей зоны. Включается вращение шпинделя с цанговым патроном. После того, как вращение сверла включено, производится рабочая подача заточной головки. По окончании рабочего хода заточная головка отводится в начальное положение; вращение шпинделя (сверла) отключается. Цанга разжимается и заточенное сверло выскальзывает из цанги и перемещается в рукав, ведущий к бункеру готовых деталей (заточенных сверл).Цикл обработки повторяется. Расчёт усилия закрепления сверла в цанговом патроне Осевая сила Q, необходимая для затягивания цанги с обеспечением надёжного закрепления сверла, подвергаемого осевой нагрузке Р определяется выражением:
Р – осевая сила, возникающая при заточке сверла, Р=200 Н;
φ – угол трения, φ=arctgf1; f1 – коэффициент трения конусной поверхности; Е=2,1*106 кгс/см2 – модуль упругости стали, идущей на изготовление цанги; l – расстояние от плоскости задела лепестка цанги до середины зажимающего конуса цанги; f – стрела прогиба лепестка, f=δ=0,2 мм; δ – зазор между цангой и сверлом (до начала зажима); z – число лепестков цанги;
b – "ширина" сектора лепестка цанги; h – толщина лепестка цанги. Подставляя известные параметры в формулы, получаем:
С учетом коэффициента запаса по
закреплению к=2,5, потребное усилие закрепления Q составит:
|
 676 Н.
676 Н.