 |
|
МЕНЮ
|
Дипломная работа: Система управления узлом дегидрирования этилбензола(Лист № 4 ДП 2102 00 022 05 ГЧ) Чертежи трасс являются проектным материалом, на основании которого производятся монтажные работы в части установки щитов, соединительных коробок, приборов и других средств автоматизации, а также прокладки электрических и трубных проводок. Эти чертежи предназначены для указания координат установки оборудования, автоматики, направления потоков электрических и трубных проводок и для рекомендаций по способам их крепления [1]. На плане трасс показывают: -контуры зданий объекта, цеха или промышленной площадки, с указанием каналов, траншей, эстакад, планировочных отметок, а также обозначение осей и рядов строительных колонн; -поэтажное расположение технологического оборудования и проводок; -места установки первичных приборов и отборов; -символы приборов, регуляторов и других средств автоматизации, установленных вне щитов; -условное изображение щитов, пультов, шкафов, соединительных коробок, протяжных коробок и т. д.; -условное изображение электрических и трубных проводок всех назначений и конструкций, на которых они прокладываются; -условное изображение проходов проводок через стены и перекрытия зданий и сооружений; -общие пояснения, примечания и технические условия; -перечень монтажных материалов, изделий, конструкций; -относящиеся чертежи. На чертеже плана трасс (Лист № 4 ДП 2102 00 022 05 ГЧ) представлены план операторного помещения и фрагмент плана трасс реакторного блока. План операторного помещения выполнен в масштабе 1:100, на нем с помощью условно графических изображений показано расположение шкафов РСУ, ПАЗ за щитом, а также рабочие места операторов-технологов. План трасс изображен в масштабе 1:40. На схеме изображены: реактора поз. Р-202/1,2 и используемые первичные измерительные преобразователи. Все приборы и трассы расположены на различных уровнях. Кабели приборов протянуты в соединительные коробки, а от них в короб, который проложен в операторное помещение. Вся нумерация приборов, кабелей и соединительных коробок соответствует нумерации на схеме внешних и трубных проводок (Лист №3 ДП 2102 00 022 05 ГЧ). При составлении плана трасс использовались функциональная схема (Лист № 1 ДП 2102 00 022 05 ГЧ) и схема внешних и трубных проводок (Лист № 3 ДП 2102 00 022 05 ГЧ). 4.3 Описание схемы подключения барьеров искробезопасности (Лист № 5 ДП 2102 00 022 05 ГЧ) На плакате представлен общий вид системы управления и блокировки APACS+/QUADLOG в масштабе 1:100, а также расположение барьеров искробезопасности HiD 2030SK, HiD 2062, HiD 2072, HiD 2038, HiD 2872, HiD 2842 на терминальных панелях, каждая из которых рассчитана на 8, или 16 слотов. Данная схема разрабатывается на основе функциональной схемы автоматизации (Лист № 1 ДП 2102 00 022 05 ГЧ) и схемы внешних электрических и трубных проводок (Лист № 3 ДП 2102 00 022 05 ГЧ). Терминальные панели барьеров расположены в напольных шкафах системы управления и блокировки APACS+/QUADLOG (Лист №5 ДП 2102 00 022 05 ГЧ поз.5,6,7,8). В напольных шкафах системы управления и блокировки кроме терминальных панелей барьеров расположены блоки питания; каркас системный MODULRAC на 10 слотов, на котором размещены управляющие модули ACM, стандартные аналоговые модули SAM, модули ввода напряжения VIM; каркас системный MODULRAC на 6 слотов с дискретными модулями критических операций; интерфейс магистрали APACS/Ethernet - RNI; кабельные лотки (Лист №5 ДП 2102 00 022 05 ГЧ поз.1,2,3,4,9 соответственно). К барьерам искробезопасности подходят контрольные многожильные кабели марки КВВГЭ 19×1,5 от соединительных коробок, обозначение и нумерация которых соответствует соединительным коробкам со схемы внешних электрических и трубных проводок (Лист №3 ДП 2102 00 022 05 ГЧ), а также компенсационные кабели марки ПКВ 2×1,5. 4.4 Описание диаграммы контуров управления (Лист №6 ДП 2102 00 022 05 ГЧ) Для разработки данной схемы необходимы функциональная схема автоматизации (Лист № 1 ДП 2102 00 022 05 ГЧ), схема внешних электрических и трубных проводок (Лист № 3 ДП 2102 00 022 05 ГЧ) и структурная схема (Лист №2 2102 00 022 05 ГЧ). На схеме в виде графических изображений показаны контуры регулирования давления с коррекцией по температурам (поз.9), уровня (поз.38), расхода (поз.3), расхода с коррекцией по температуре (поз.16), давления (поз.6). На чертеже наглядно представлена связь полевого оборудования (датчики и исполнительные механизмы, и соединительные коробки), с указанием кабельной продукции типа КВВГ 4×1,5, КВВГЭ 19×1,5, ПКВ 2×1,5 и помещения управления, в виде указания барьеров искробезопасности, модулей ввода-вывода и модулей управления. 5. Расчет цифровой АСР 5.1 Построение математической модели (Лист №7 ДП 2102 00 022 05 ГЧ) Функциональная схема АСР.
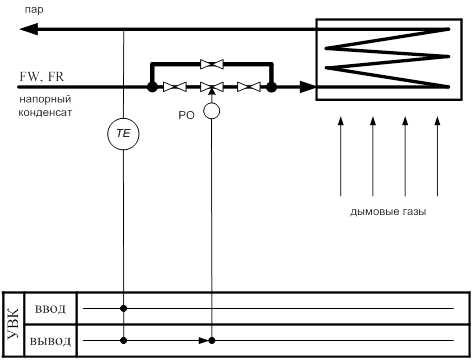
Рис.5.1. Цифровая АСР температуры напорного конденсата FW, FR – каналы внесения в объект возмущающих воздействий. Объектом регулирования является экономайзер печи поз.П-201/2, в котором поддерживается заданное значение температуы. Динамические характеристики объекта. По каналу регулирования: задана переходная характеристика, снятая при ступенчатом перемещении регулирующего органа на 10 % хода. Кривая переходного процесса представлена на рисунке 5.2.
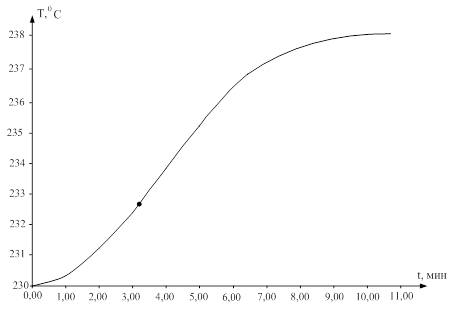
Рис. 5.2. Кривая разгона Канал возмущения: передаточная функция объекта по каналу возмущения:
где ТВ1,ТВ2,ТВ3, КВ – соответствующие постоянные времени, коэффициент передачи по каналу возмущения. Требования к качеству работы АСР: 1) динамическая ошибка регулирования Dqмах,з< 6,0 o C; 2) время регулирования Тр,з£ 35 мин.; 3) степень затухания переходного процесса yз=0,91; 4) остаточное отклонение регулируемого параметра Dqст,з=0 °С. Требуется: 1. Построить математическую модель объекта по его переходной характеристике; 2. Найти оптимальные значения настроечных параметров цифровых регуляторов при степени колебательности m=0,366 и следующих значениях времени такта квантования: Тkw=0,3 мин, 0,5 мин, 0,75 мин; 3. Построить переходные процессы при нанесении следующих воздействий: - по каналу управления (U) - изменением задания регулятору на 10С; - по каналу возмущения (FW) - изменением расхода конденсата до клапана на 1 м3/с; - по каналу регулирующего органа (FR) - изменением расхода конденсата, которое эквивалентно перемещению регулирующего органа на 10%; 4. Оценить качество работы АСР при различных значениях времени такта квантования и различных настройках регулятора; 5. Выбрать регулятор и значения его настроечных параметров, которые обеспечивают заданное качество процесса регулирования при минимальных затратах на управление (при возможно большем времени такта квантования и более простом регуляторе). Построение математической модели объекта по экспериментальной переходной характеристике. Задача построения математической модели объекта по его переходной характеристике включает в себя следующие этапы [18]: 1. Выбор вида аппроксимирующей передаточной функции, дающего приемлемую модель объекта для проектирования АСР с типовыми регуляторами 2. Определение параметров модели, обеспечивающих совпадение аппроксимируемой и аппроксимирующей переходных характеристик согласно выбранному критерию приближения 3. Оценка точности аппроксимации. Выбор вида аппроксимирующей передаточной функции. Разработано большое количество методов аппроксимации экспериментальных данных, отличающихся друг от друга структурой модели, критериями приближения, особенностями выполнения расчетов. Рассмотрим метод, согласно которому аппроксимирующая передаточная функция ищется в виде:
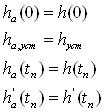
где T1, Т2, k, τ — соответственно постоянные времени, коэффициент передачи и запаздывание объекта; п - показатель, определяющий порядок знаменателя передаточной функции (2); Критерием приближения (адекватности) является требование совпадения аппроксимируемой h (t) и аппроксимирующей ha(t) характеристик в точках t = 0, t = ¥ и в точке перегиба, определяемой из условия h''(t)=0. Кроме того, в точке перегиба эти характеристики должны иметь одинаковый наклон. Таким образом, критерий приближения имеет следующий вид:
Для определения
производной h’(t) переходной характеристики h(t) в точке, где
эта характеристика имеет максимальный наклон, проводится касательная и
определяется длина отрезка Т0 заключённого между точкой этой
касательной с горизонтальной осью (абсцисс) и линией нового установившегося
значения характеристики, то есть с линией hуст. Приняв значение:
Это условие позволяет
найти численные значения постоянных времени Тi, Определение параметров модели. Расчёты параметров удобно проводить с помощью номограммы, приведенной на рис. 5.3.
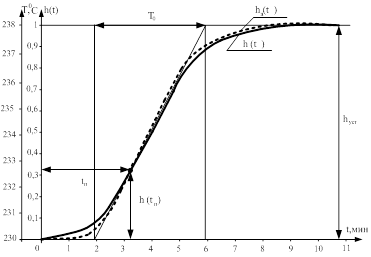
Рис. 5.3. Номограмма для определения параметров модели Порядок расчета следующий: 1. По переходной характеристике объекта (рис.4) определяются исходные данные для аппроксимации: значение в точке перегиба h(tп) = 0,33; установившееся значение переходной характеристики hуст = 1; время точки перегиба tп = 3,3; время регулирования T0 = 4. 2. Находим величину b = Имеем b = При b = 0,33 принимаем n = 3. 3. Исходя из найденных
значений b и n по таблицам (номограмме) определяем отношения Имеем: Тогда: T1 = 0,378 × T0 = 0,378×4 = 1,512 мин; T2 = 0,45 × T1 = 0,45×1,512 = 0,68 мин; tп.а = 1,658 × T1 = 1,658×1,512 = 2,51 мин. Поскольку tп > t п.а, находим время запаздывания t = 3,3 – 2,51 = 0,79 мин. Найдем численное значение коэффициента передачи К, входящего в выражение для аппроксимирующей передаточной функции (1). Имеем где -Δ отклонение температуры в переходном режиме при t ® ¥;
С учетом найденных значений К, t, Т1, Т2, n аппроксимирующая передаточная функция запишется в виде:
При оценке точности аппроксимации в передаточной функции (4) согласно (1) и (5) необходимо положить: К = 0,8; t = 0,79; Т = 1,512; α1 = 0,45; α2 = 0; n1 = 1; n 2 = 3; n 3 = 0. На основании полученных данных строим график для аппроксимируемой и аппроксимирующей кривых рис. 5.4.
Рис.5.4. Аппроксимируемая и аппроксимирующая кривые Расчёт на ЭВМ переходной функции модели (5) и сравнение её с заданной показывают, что модель (5) адекватна реальному процессу. Максимальное отклонение друг от друга ординат аппроксимируемой и аппроксимирующей переходных характеристик не превышает 3,5 % (при допустимых 5%). 5.2 Расчет оптимальных настроечных параметров цифровых регуляторов Модель и расчетная схема цифровой АСР. При исследовании систем с цифровыми регуляторами обычно вместо известной структурной схемы ЦАСР с АЦП, ЦАП и ЦВУ рассматривают модель ЦАСР и далее ее расчетную схему.
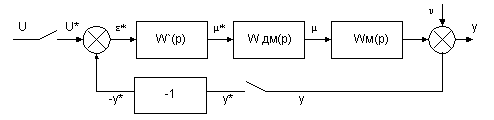
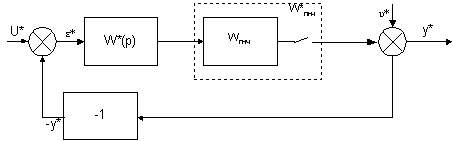
Рис. 5.5. Модель цифровой системы В АЦП осуществляется преобразование непрерывного сигнала U(t), y(t) в дискретную последовательность чисел U(1t) и y(1t), где 1t – дискретное время, t – такт квантования, 1- номер такта квантования. При исследовании систем с цифровым регулятором перейдем от функциональной схемы к модели цифровой системы. В модели АЦП заменяют дельта импульсными модуляторами, а ЦАП входит как демодулятор. Демодулятор и объект образуют приведенную непрерывную часть системы с передаточной функцией: Wпнч=Wgm*Wm Дельта-импульсные модуляторы осуществляют преобразование непрерывных сигналов U(t) и y(t) в синхронные импульсные последовательности U*(t) и у*(t) в соответствии с формулами
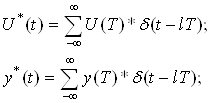
где U*(t) и y*(t) — модели сигналов; Т- период квантования сигнала по времени. Демодулятор обычно представляет собой фиксатор нулевого порядка с передаточной функцией:
Структурная схема может быть преобразована в расчетной схеме системы.
Рис.5.6. Расчётная схема цифровой АСР Расчётная схема состоит из дискретного регулятора W* и дискретного объекта с передаточной функцией W*пнч(р), а все сигналы представляются синхронной последовательностью моделированных d импульсов. Передаточная функция разомкнутой цифровой АСР запишется в виде:
Передаточная функция дискретной системы связана с передаточной функцией её непрерывной части следующим соотношением:
где: wкв=2p/Т — частота квантования в дискретной АСР, Т — время такта квантования. С учётом этого передаточная функция разомкнутой дискретной системы запишется в виде: Алгоритмы вычисленных устройств цифровых регуляторов. Вычислительные устройства цифровых регуляторов реализуют следующие унифицированные законы регулирования: пропорциональный (П‑закон): m(lT)=k1e(lT); (11) интегральный (И‑закон): пропорционально‑интегральный (ПИ‑закон):
пропорционально‑интегральный с воздействием по производной (ПИД‑закон):
Параметры настройки регуляторов: коэффициенты k1, k2, k3 и время такта (период) квантования T. Ниже приводятся соотношения, связывающие соответствующие параметры настройки дискретных и непрерывных регуляторов: k1 =kр, (15) k2 /Т=kр/Ти, (16) k3Т=kрТg; (17) где: Kр — коэффициент передачи непрерывного ПИД‑регулятора, Тр — время изодрома, Тg — время предварения. Передаточные функции вычислительных устройств цифровых регуляторов, определенные в смысле дискретного преобразования Лапласа, имеют вид: Таблица 4 - Алгоритм цифровых регуляторов
Запас устойчивости систем с цифровыми регуляторами. Оценка запаса устойчивости может проводиться с помощью корневого и частотного показателей колебательности. Примем к рассмотрению способ оценки запаса устойчивости по распределению корней характеристического уравнения замкнутой системы, который позволяет легко и просто выполнить вычисления на ЭВМ, границы заданного запаса устойчивости в пространстве параметров настройки регулятора по соотношениям, получающиеся из условия:
где m — заданный корневой показатель затухания свободных колебаний. При этом частота меняется в пределах от w =0 до w =p/Т, а из бесконечно большого числа решений уравнения выбирается только одно, соответствующее минимальному w. Подставив в выражения с учетом, получим: (19)
Введем обозначение:
Тогда соотношение можно привести к виду:
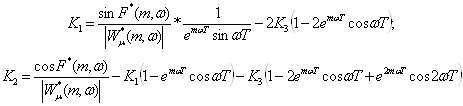
Комплексные функции переменной w в соотношении распишем в виде суммы действительной и мнимой частей e-jwT=coswT-jsinwT, (22) W* m(m,jw)=½W* m(m,jw)½*[cosF* (m,w)+jsinF*(m,w)]; (23) где: ½W*m(m,jw)½, F* (m,w) — модуль и фаза расширенной комплексной частотной характеристики эквивалентного дискретного объекта. Записав полученное равенство в виде системы двух уравнений (одно — для действительной, другое — для мнимой части равенства) и решив эту систему относительно параметров К1 и К2, будем иметь:
Пространство параметров настройки цифрового ПИД‑регулятора четырехмерно. Задаваясь конкретными значениями параметров Т и К3, можно в плоскости параметров К1, К2 построить параметрическую кривую. Область, ограниченная этой кривой и прямыми К1=0 и К2=0, является областью заданного запаса устойчивости для выбранных значений Т и К3. Последовательность расчета оптимальных настроек цифровых регуляторов. Расчет оптимальных настроек цифровых регуляторов на ЭВМ осуществляется методом расширенных частотных характеристик и состоит из двух этапов: 1. Расчет и построение в плоскости параметров настроек регулятора линии равной степени колебательности (m=const) 2. Определение в области заданного запаса устойчивости точки, обеспечивающей наилучшее качество регулирования. Линия равной степени колебательности m=const строится в плоскости параметров К1 и К2, определяемых по формулам. Процесс расчета оптимальных настроечных параметров, поэтапно: Страницы: 1, 2, 3, 4, 5, 6, 7, 8, 9, 10, 11, 12, 13 |
 ( 3 )
( 3 ) , критерий приближённости можно
переписать следующим образом:
, критерий приближённости можно
переписать следующим образом: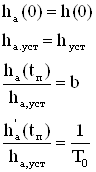 ( 4 )
( 4 )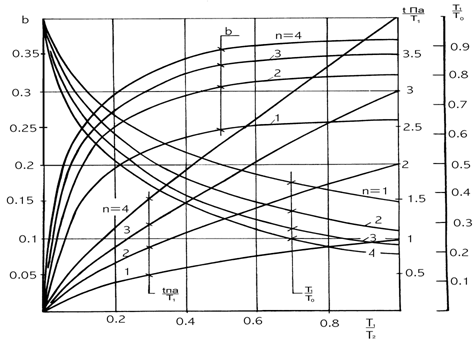


 (24)
(24)
Copyright © 2012 г.
При использовании материалов - ссылка на сайт обязательна.