 |
|
МЕНЮ
|
Дипломная работа: Исследование динамических характеристик электроприводов постоянного тока при различных способах возбужденияНаличие силового полупроводникового преобразователя, включенного между источником питания и двигателем, вносит определенную специфику, которую необходимо учитывать при анализе энергетических характеристик электропривода. Рассмотрим эту специфику. 1.При управлении от силового полупроводникового преобразователя обмотки электродвигателя запитываются импульсным напряжением. При этом токи в обмотках также пульсируют. Импульсный характер напряжения и пульсация тока вызывают дополнительные потери в двигателе, которые необходимо учитывать при анализе энергетических характеристик. 2.Силовые элементы преобразователя (диоды,
тиристоры, транзисторы) не являются идеальными ключами. Поэтому в режимах,
когда они проводят ток (для транзисторов это режим насыщения), на них
рассеивается определенная мощность. Эта мощность, которую называют
квазистатической, зависит от среднего и эффективного (действующего) тока и от
параметров полупроводникового прибора в режиме протекания прямого тока. На рис. 1.5
в качестве примера приведена характеристика диода для прямого тока и показаны
его два основных параметра: Uo – остаточное напряжение на диоде врежиме
протекания прямого тока и
где Iср, I – средний и эффективный ток через диод. Аналогично определяются квазистатические потери в тиристоре и транзисторе. Квазистатические потери в силовом полупроводниковом преобразователе зависят, прежде всего, от мощности на выходе, но, кроме того, они существенно зависят от алгоритма управления преобразователем, от структуры замкнутого электропривода и от его параметров. Все эти обстоятельства необходимо учитывать при анализе энергетических характеристик. Такой учет возможен только в том случае, когда квазистатические потери рассчитываются после синтеза электропривода. 3. Кроме квазистатических потерь в полупроводниковых элементах преобразователя при переключениях выделяются значительные потери, которые называют динамическими. При включении транзистора диод закрывается не сразу, и некоторое время ток протекает в практически короткозамкнутой цепи. Качественные кривые тока транзистора и напряжения на транзисторе в процессе коммутации показаны на рис. 1.7. Мощность, выделяемая в транзисторе в период коммутации, являясь произведением напряжения на ток, может оказаться значительной. Аналогичная картина наблюдается и при выключении транзистора. Динамические потери в полупроводниковых элементах силовых преобразователей зависят от частоты переключения и от параметров самих приборов. В современных электроприводах переменного тока, например, где частота переключений составляет десятки (от пяти до пятидесяти килогерц), динамические потери могут в два-три раза превысить потери квазистатические. Таким образом, при анализе энергетических характеристик необходимо учитывать динамические потери в силовом преобразователе. 4. Включение полупроводникового преобразователя между источником питания и двигателем обуславливает влияние преобразователя на источник. Если источником питания является сеть переменного тока, то это влияние проявляется в искажении формы потребляемого тока, то есть в появлении гармоник в потребляемом токе. Эти гармоники существенно влияют на питающую сеть, приводя ко многим нежелательным последствиям. Поэтому при анализе энергетических характеристик электропривода необходимо исследование гармонического состава потребляемого тока. Четыре перечисленные особенности, влияющие на энергетические характеристики электропривода, необходимо учитывать при анализе и проектировании. Динамические характеристики В качестве динамических характеристик обычно рассматриваются зависимости изменения скорости от времени на выходе ЭП при скачкообразном изменении входного задающего сигнала (характеристики по управлению) и при скачкообразном изменении момента нагрузки (характеристика по возмущению). На рис. 1.8 в качестве примера показана динамическая характеристика ЭП по управлению. В качестве параметра в динамических режимах рассматривается электромеханическая постоянная времени – это время, в течение которого ЭП разгоняется от неподвижного состояния до скорости идеального холостого хода под действием неизменного момента, равного моменту короткого замыкания (пускового момента). В этом случае, интегрируя основное уравнение движения, получим:
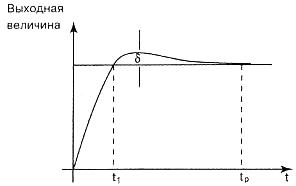
В динамическом режиме качество электропривода характеризуется следующими параметрами (см. рис. 1.8): · временем первого согласования t-1; ·
перерегулированием
· временем переходного процесса tp.
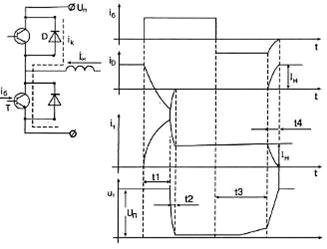
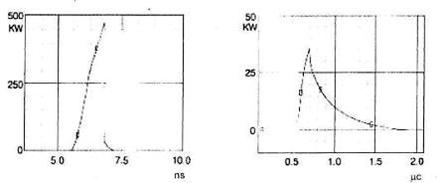
Рисунок 1.8. Параметры переходного процесса в электроприводе 2. Силовые полупроводниковые преобразователи 2.1 Транзисторные преобразователи Общие замечания Полупроводниковые преобразователи в электроприводах постоянного и переменного тока должны характеризоваться следующими основными свойствами: · двусторонней проводимостью энергии между источником питания и исполнительным двигателем, являющимся нагрузкой преобразователя, для обеспечения его работы во всех квадрантах механической характеристики; · малым и не зависящим от тока выходным сопротивлением для получения механических характеристик, близких к естественным, и, в конечном счете, для получения хороших статических и динамических характеристик электропривода в целом; · жесткой внешней характеристикой и малой инерционностью, высоким КПД, достаточной перегрузочной способностью для обеспечения необходимых форсировок в переходных режимах работы привода; · высокой помехозащищённостью и надежностью; малой массой и габаритами; отсутствием влияния на сеть. Основным назначением полупроводникового преобразователя является регулирование скорости исполнительного двигателя электропривода. В электроприводах постоянного тока это достигается регулированием напряжения на выходе преобразователя. В приводах переменного тока необходимо регулировать напряжение и частоту на выходе преобразователя по определенному закону. Перечисленным основным требованиям в наибольшей степени удовлетворяют транзисторные преобразователи, работающие в режиме переключения и питающиеся от источника постоянного напряжения. Такие преобразователи в электроприводах постоянного тока получили название широтно-импульсных (ШИП). Принципы построения силовых транзисторных ключей Силовой транзисторный ключ (СТК), является тем элементом преобразователя, который управляет процессами преобразования энергии. Специфика протекания этих процессов требует более детального рассмотрения принципов работы СТК и его элементной базы для обеспечения надёжности электропривода в целом. Рассмотрим классическую схему одного плеча преобразователя. На рис. 2.1 представлена схема такого плеча и показаны электромагнитные процессы, протекающие в нем при включении и выключении транзистора. Классическая теория динамических процессов выделяет четыре коммутационных интервала при работе плеча на активно-индуктивную нагрузку, два при включении транзистора и два при выключении. При включении транзистора выделяются этап восстановления диода в фазе высокой обратной проводимости (t1 на рис. 2.1) и этап установления стационарного состояния силового высоковольтного транзистора (t2 на рис. 2.1). На первом из отмеченных этапов по цепи «транзистор-диод» протекает значительный ток, который может превысить номинальный в несколько раз. При этом напряжение на транзисторе остается равным напряжению питания. Этот этап является наиболее опасным для транзистора. На втором этапе ток уменьшается до номинального при одновременном уменьшении напряжения на транзисторе. При выключении транзистора выделяются этап рассасывания неосновных носителей заряда в коллекторе силового высоковольтного транзистора (t3 на рис. 2.1) и этап спада тока коллектора силового транзистора и включения диода (t4 на рис. 2.1). На всех отмеченных интервалах коммутации в транзисторе и диоде выделяется значительная мощность. Эту мощность, которая определяет динамические потери в преобразователе, необходимо уметь определять для того, чтобы иметь возможность уверенно судить о надежности работы последнего. Подтверждение вышесказанному представлено на рис. 2.2, где на примере показаны потери в транзисторе трехфазного инвертора с ШИМ при включении и выключении. В качестве транзисторов инвертора были использованы IGBT транзисторы типа HGTG24N60D1D, напряжение питания инвертора U=600 V, выходная мощность инвертора равнялась 50 кВт.
Рисунок 2.1. Динамические процессы переключения СТК
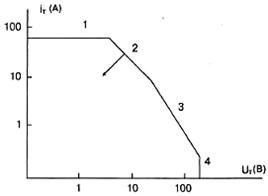
Рисунок 2.2. Динамические потери в транзисторе СТК Кроме необходимости расчета мощности динамических потерь имеется еще ряд факторов, которые необходимо принимать во внимание при проектировании преобразователя. Технология изготовления силовых транзисторов до сих пор требует применения специальных мер для обеспечения надёжной работы СТК. При этом обычно приходится решать задачи, связанные как с уменьшением статических и динамических потерь в СТК, так и обеспечением области безопасной работы (ОБР) силового транзистора. При построении высоковольтных СТК основным требованием является обеспечение траектории переключения силового транзистора в области безопасной работы. Известно, что основной причиной выхода из строя транзистора является вторичный пробой (ВП), возникающий при включении и выключении СТК. Типовая ОБР силового транзистора (СТ), построенная в логарифмическом масштабе, изображена на рис. 2.3. Эта ОБР имеет четыре границы, каждая из которых соответствует предельным параметрам СТ.
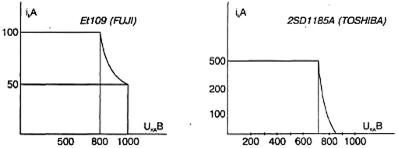
Рисунок 2.3. Область безопасной работы силового транзистора Граница 1 соответствует максимальному току коллектора в режиме насыщения. Пробой транзистора на границах 1 и 2 соответствует электрическим режимам, при которых температура структуры транзистора достигает предельно допустимого значения. Граница 3 ОБР соответствует наступлению в приборе вторичного пробоя (ВП). Под ВП подразумевается локальный саморазогрев структуры, приводящий к проплавлению перехода транзистора. Области локального саморазогрева получили название «горячих пятен». При ВП однородное распределение тока через транзистор сменяется неоднородным. При этом возникает положительная обратная связь, при которой увеличение локальной плотности тока вызывает увеличение температуры в этой области, которая в свою очередь вызывает ещё большее увеличение плотности тока и т.д. На рис. 2.4 в качестве примера приведены области безопасной работы реальных транзисторов фирм Fuji и Toshiba.
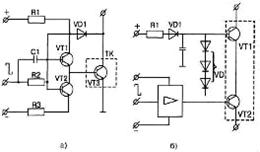
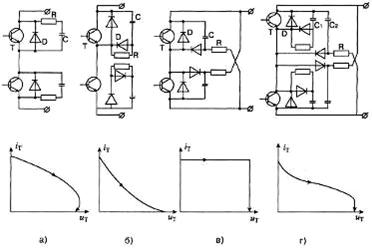
Рисунок 2.4. Реальные ОБР транзисторов Для надёжной защиты СТК при переключении в процессе работы необходимо либо как-то определять предпробойное состояние силового транзистора и принимать меры к его защите, либо заведомо управлять транзистором так, чтобы он не выходил из ОБР. Конечно, более предпочтителен первый способ обеспечения надёжности СТК, но здесь возникают две сложности. Во-первых, ВП развивается достаточно быстро и защита должна быть достаточно быстродействующей. Во-вторых, довольно сложно зарегистрировать предпробойное состояние транзистора и принять своевременные меры к его предотвращению. Этот способ возможно реализовать лишь для процесса включения СТК, основываясь на деформации входных вольт-амперных характеристик. С точки зрения простоты схемной реализации наиболее удобным оказывается критерий, позволяющий определить границу ОБР по резкому возрастанию тока коллектора. В этом случае СТК включается на 1–2 мкс, по истечении которых определяется ток через силовой транзистор. Если этот ток превышает критическое значение, то поступает команда на выключение силового транзистора, если нет – силовой транзистор остаётся включённым. Время развития ВП при изотермическом процессе шнурования тока (в процессе выключения) составляет несколько десятков наносекунд, поэтому практически отсутствует схемная возможность выявить предпробойное состояние и принять меры к его предотвращению. Для обеспечения надёжной работы силового транзистора при запирании в настоящее время используются в основном три разомкнутых способа управления. Первый сводится к автоматической регулировке управляющего тока с обеспечением заданной начальной форсировки и последующим отслеживанием малой глубины насыщения выходного транзистора Этот способ наиболее просто реализуется цепью нелинейной диодной обратной связи, охватывающей управляющий транзистор (рис. 2.5 а).
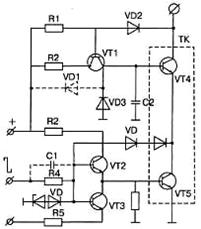
Рисунок 2.5. Схемы защиты силового транзистора Второй способ, обеспечивающий форсированное выключение силового транзистора, эффективно реализуется в каскадной схеме соединений высоковольтного и низковольтного транзисторов (рис. 2.5 б) При этом низковольтный транзистор включен в цепь эмиттера высоковольтного транзистора. На рис. 2.6 приведена схема, в которой реализуются оба рассмотренных способа. Эту схему можно считать самой надёжной с точки зрения обеспечения ОБР, однако, лишний транзистор в силовой цепи, особенно при больших токах, делает её малопривлекательной для проектировщиков.
Рисунок 2.6. Универсальная схема защиты силового транзистора Наконец, третий способ обеспечения надёжной защиты СТК при запирании сводится к использованию цепей формирования траектории выключения. Примеры выполнения цепей формирования траектории (снаберов) для силовой транзисторной стойки приведены на рис. 2.7. Здесь же приведены траектории переключения силовых транзисторов.
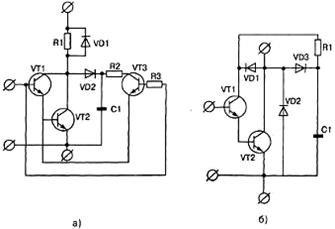
Рисунок 2.7. Демпфирующие цепи СТК Простая RC-цепочка (рис. 2.7 а) обычно не устраивает проектировщиков, т. к. допускает значительное превышение напряжения на коллекторе транзистора в процессе запирания. Типовым решением является схема, приведённая на рис. 2.7 б. Здесь эффективное ограничение коллекторного напряжения СТК в начальный период запирания обеспечивается диодом, шунтирующим разрядное сопротивление. Ограничение коллекторного напряжения при запирании обеспечивается за счёт выбора достаточно большой ёмкости демпфирующего конденсатора. Этот конденсатор заряжается после запирания силового транзистора до полного напряжения источника питания, а при следующем включении СТК полностью разряжается через разрядное сопротивление. Последнее обстоятельство обуславливает достаточно большие потери в демпфирующих цепях. Избежать их можно, применив схему (рис. 2.7в), где конденсатор всегда находится под напряжением питания и стабилизирует напряжение на коллекторе, срезая коммутационный выброс при выключении СТК. Это повышает надежность, но не исключает полностью возможность возникновения ВП. Наиболее эффективной является демпфирующая цепочка по схеме рис. 2.7 г. Здесь емкость С1 выбирается достаточно малой, т. к. она формирует фронт выключения СТК, а емкость С2 выбирается достаточно большой. В результате ограничиваются одновременно пик коллекторного напряжения, потери в СТК и потери в демпфирующих цепях. Выбор демпфирующей цепочки зависит от условий работ СТК. Для эффективной работы демпфирующих цепей необходимо определённое время, в течение которого конденсатор разряжается через СТК, подготавливая условия для последующего его выключения. Отмеченное требование часто не удаётся реализовать при ШИМ СТК, а именно такая модуляция используется при управлении транзисторным силовым преобразователем в системах электропривода. Поэтому применение демпфирующих цепей может оказаться нерезультативным и следует обратиться к рассмотренным выше способам управления СТК. Некоторые модификации демпфирующих цепей СТК представлены на рис. 2.8.
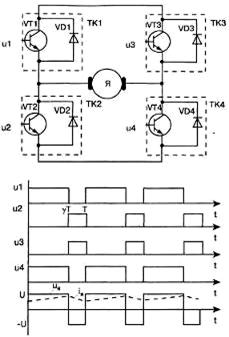
Рисунок 2.8. Схемы формирования траектории СТК На рис. 2.8а разрядный ток демпфирующего конденсатора С1 используется для начальной форсировки тока базы СТК VT2. Это позволит уменьшить время включения СТ и потери при включении. В схеме рис. 2.8б реализуется форсированное включение СТК за счёт разряда конденсатора по цепи C1-R1-VT1-VT2 и поддержание малой глубины насыщения СТ VT2 за счёт цепи VD1, VT1. 2.2 Транзисторные преобразователи для управления двигателями постоянного тока Принципы построения и управления Как уже отмечалось, в этом случае используется широтно-импульсный преобразователь. Упрощённая принципиальная схема ШИП представлена на рис. 2.9. Она содержит четыре транзисторных ключа ТК1-ТК4. В диагональ моста, образованного транзисторными ключами, включена нагрузка. Нагрузкой в приводах постоянного тока является двигатель постоянного тока. В электроприводах двигатель постоянного тока управляется, как правило, по цепи якоря, поскольку только при таком управлении могут быть получены требуемые качественные показатели привода. Питание ШИП осуществляется от источника постоянного тока, шунтированного конденсатором. Наиболее простой способ управления ШИП по цепи якоря – симметричный. При симметричном способе управления в состоянии переключения находятся все четыре транзисторных ключа моста, а напряжение на выходе ШИП представляет собой знакопеременные импульсы, длительность которых регулируется входным сигналом. В ШИП с симметричным управлением среднее напряжение Uh на выходе ШИП равно нулю, когда относительная продолжительность включения у0 = 0,5. Временные диаграммы ШИП при симметричном способе управления приведены на рис. 2.9. Симметричный способ управления обычно используется в маломощных приводах постоянного тока.
Рисунок 2.9. Транзисторный ШИП Его преимуществом является простота реализации и отсутствие зоны нечувствительности в регулировочной характеристике. Недостатком ШИП с симметричным управлением является двухполярное напряжение на нагрузке и, в связи с этим, повышенные пульсации тока в якоре исполнительного двигателя. Стремление исключить этот недостаток привело к разработке способов, обеспечивающих однополярное напряжение на выходе ШИП. Простейшим из них является несимметричный.
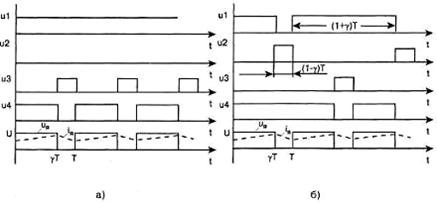
Рисунок 2.10. Способы управления СТК ШИП Несимметричное управление представлено на рис. 2.10а. В этом случае переключаются транзисторные ключи фазной группы ТКЗ и ТК4 (ключи ТК1 и ТК2 при противоположной полярности входного сигнала), транзисторный ключ ТК1 постоянно открыт и насыщен, а ключ ТК2 постоянно закрыт. Транзисторные ключи ТКЗ и ТК4 переключаются в противофазе, обеспечивая протекание тока якоря от противо-эдс двигателя. При этом на выходе ШИП формируются однополярные импульсы и среднее напряжение на выходе равно нулю, когда относительная продолжительность включения одного из нижних по схеме рис. 2.9 транзисторов Уо = 0. Недостатком рассмотренного способа управления является то, что верхние по схеме транзисторные ключи (ТК1, ТКЗ) по току загружены больше, чем нижние. Этот недостаток устранён при поочерёдном управлении, временные диаграммы которого изображены на рис. 2.10б. Здесь при любом знаке входного сигнала в состоянии переключения находятся все четыре транзисторных ключа моста, при этом частота переключения каждого из них в два раза меньше частоты напряжения на выходе. Управляющие напряжения транзисторных ключей одной фазы моста ТК1, ТК2 и ТКЗ, ТК4 постоянно находятся в противофазе; при этом ключи переключаются через период выходного напряжения Т. Этим достигаются одинаковые условия работы полупроводниковых приборов в мостовой схеме. При некотором знаке входного сигнала управляющие импульсы ul, u4 длительностью t = (1+у) Т подаются на диагонально расположенные транзисторные ключи (рис. 2.10) со сдвигом на полпериода, а управляющие импульсы u2, u3 длительностью t = (l-y) T, также со сдвигом на полпериода, подаются на транзисторы противоположной диагонали (ТК2, ТКЗ). В этом случае на интервале нагрузка подключена к источнику питания с помощью диагонально расположенных ключей, а на интервале (1-у) Т нагрузка закорочена с помощью верхних или нижних транзисторных ключей. При изменении знака входного сигнала порядок управления диагональными ключами изменяется на противоположный. При поочерёдном управлении на нагрузке формируются однополярные импульсы длительностью T, пропорциональной сигналу на входе. Обобщенная функциональная схема управления транзисторным ШИП изображена на рис. 2.11. Она содержит генератор (Г), генератор пилообразного напряжения (ГПН), схему сравнения (СС), распределитель импульсов (РИ) и усилители (У). Как правило, между усилителями сигнала управления и распределителем включены элементы гальванической развязки (оптотранзисторы). Диаграммы на рис. 2.11 поясняют принцип работы схемы управления ШИП.
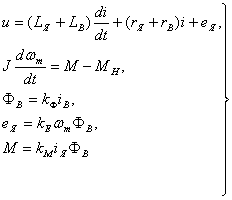
Рисунок 2.11. Функциональная схема управления ШИП 3. Математическое описание, передаточные функции и структурные схемы двигателей постоянного тока 3.1 Двигатель постоянного тока с независимым возбуждением На рис. 3.1 схематически показан двигатель постоянного тока с независимым возбуждением. Уравнения, которыми описываются электромагнитные и электромеханические процессы в этом двигателе, имеют вид:
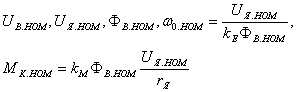
Рисунок 3.1 Приведем уравнения (3.1) к безразмерному виду, приняв в качестве базовых единиц номинальные значения переменных двигателя:
Где
– относительные переменные состояния двигателя,
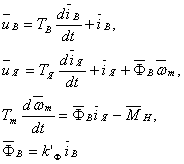
Уравнения (4.2) могут быть представлены в операторной форме:
которым соответствует модель, представленная на рис. 3.2а.
Рисунок 3.2а. Модель ДПТ с независимым возбуждением
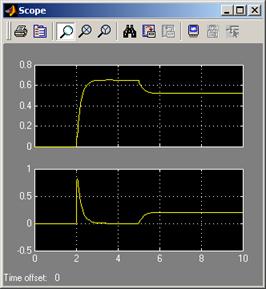
Рисунок 3.2б. Результаты моделирования ДПТ с независимым возбуждением Модель имеет два входа управления: (Uя) – управление по цепи якоря, (С/в) – управление по цепи возбуждения и один вход по возмущению (Мн) – возмущение по моменту нагрузки. Блок (TransferFcn) моделирует цепь возбуждения (постоянная времени цепи Тв = 0,5 с). Блок (TransferFcnl) моделирует цепь якоря (постоянная времени Т = 0,02 с). Блоки (Product, Product1) реализуют умножение в соответствии с уравнением 2 и 3 системы (3.3). Блоки (Sum1, Gain, Integrator) реализуют третье уравнение системы (3.3). На рис. 3.2 бпредставлены результаты моделирования двигателя, управляемого по цепи якоря. Управление по цепи возбуждения подается намного раньше для того, чтобы к моменту подачи управляющего и возмущающего воздействия поток в машине уже установился. Как следует из рис. 3.2б, все время моделирования принято равным 10 с, сигнал по управлению подается спустя 2 с с начала моделирования, а возмущение – спустя 5 с с начала моделирования. На рис. 3.2 бпредставлен переходной процесс по моменту и по скорости. В двигателе с независимым возбуждением поток можно считать постоянным. В этом случае модель двигателя упрощается, такая модель представлена на рис. 3.3. В дальнейшем эта модель будет использована для синтеза электропривода при управлении по цепи якоря.
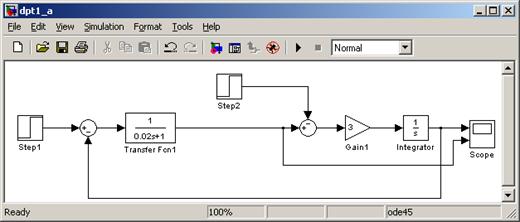
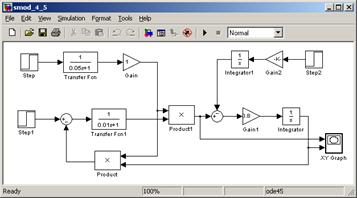
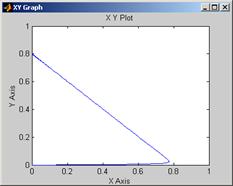
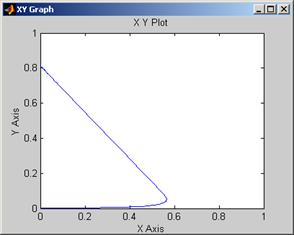
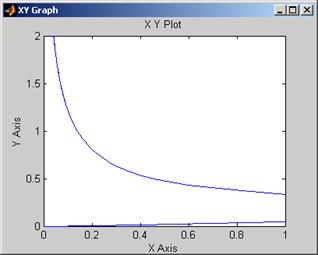
Рисунок 3.3. Модель ДПТ при постоянном токе возбуждения В приводах постоянного тока с двигателем с независимым возбуждением иногда используется так называемое двухзонное регулирование. В этом случае двигатель управляется и по цепи якоря, и по цепи возбуждения. Обычно эти управления разнесены. По цепи якоря при постоянном потоке возбуждения управление осуществляется при значительных моментах на валу, а управление по цепи возбуждения – при малых моментах. Моделирование работы двигателя в установившемся режиме и получение механической характеристики показано на рис. 3.4а, б при напряжении на якоре (uя = 0,8). В этой модели момент нагрузки формируется как интеграл от постоянного сигнала (блоки Step 1, Gain с к = 0,005 и Integratorl рис. 3.4а). Для визуализации механической характеристики использован блок XYGraph. Результаты моделирования показаны на рис. 3.4б. На оси абсцисс отложен момент, а на оси ординат – скорость.
Рисунок 3.4а. Модель для получения механических характеристик
Рисунок 3.4б. Результаты моделирования 3.2 Двигатель постоянного тока с параллельным возбуждением В двигателе постоянного тока с параллельным возбуждением обмотка
возбуждения включена параллельно якорю (рис. 3.5) В этом случае
Рисунок 3.5 Модель двигателя, построенная по этим уравнениям показана на рис. 3.6а. Результаты моделирования, приведенные на рис. 3.6б, показывают, что переходной процесс в таком двигателе по управлению несколько затянут по сравнению с двигателем с независимым возбуждением.
Рисунок 3.6а. Модель ДПТ с параллельным возбуждением
Рисунок 3.6б. Результаты моделирования Исследование механических характеристик двигателя с параллельным возбуждением проводилось на модели, показанной на рис. 3.7а. Механическая характеристика показана на рис. 3.7б.
Рисунок 3.7а. Модель для получения механических характеристик
Рисунок 3.7б. Результаты моделирования Результаты моделирования показывают, что двигатель развивает меньший пусковой момент и имеет большую скорость холостого хода по сравнению с двигателем с независимым возбуждением. 3.3 Двигатель постоянного тока с последовательным возбуждением На рис. 3.8 схематически показан двигатель постоянного тока с последовательным возбуждением. Уравнения, описывающие работу двигателя, имеют вид:
Рисунок 3.8 Введением базовых значений переменных
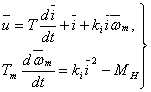
Уравнения (3.5) приводятся к безразмерному виду:
Где: Представим уравнения (3.6) в операторном виде:
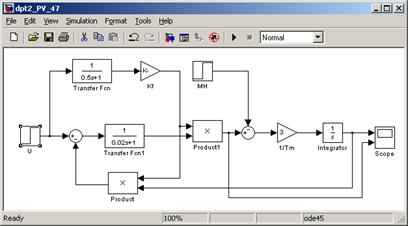
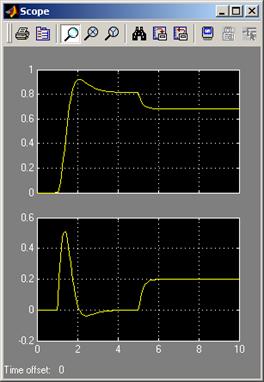
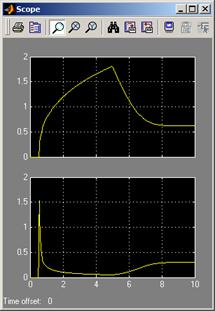
Модель двигателя, построенная по системе уравнений (3.7) представлена на рис. 3.9 апри скачке управления в момент 0,5 с и скачке возмущения в момент 5 с. Переходные процессы, показанные на рис. 3.9б, свидетельствуют о том, что при пуске моментдвигателя с последовательным возбуждением значительно превышает момент двигателя с независимым возбуждением и двигателя с параллельным возбуждением. Это достоинство двигателя широко используется в тяговых (подъемно-транспортных) электроприводах. Однако в двигателе с последовательным возбуждением при приложении нагрузки наблюдается значительный провал скорости.
Рисунок 3.9а. Модель ДПТ с последовательным возбуждением
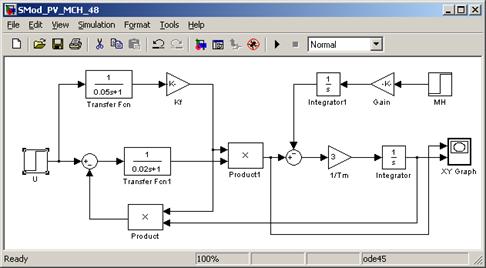
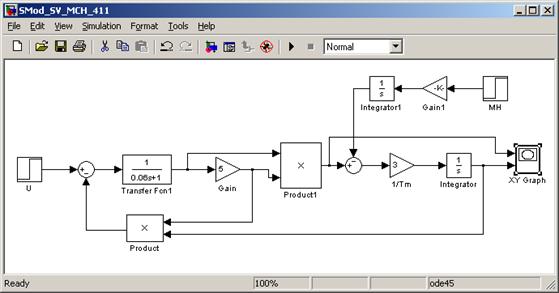
Рисунок 3.9б. Результаты моделирования Для исследования механической характеристики построена модель (рис. 3.10а) аналогично ранее описанным вариантам ДПТ, Результаты моделирования приведены на рис. 3.10а. Механическая характеристика двигателя является существенно нелинейной. При малых моментах она является очень «мягкой», а при больших моментах достаточно «жесткой».
Рисунок 3.10а. Модель для получения механических характеристик
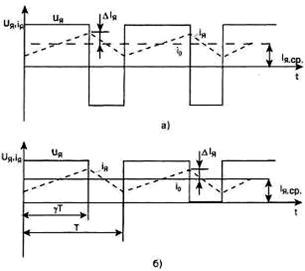
Рисунок 3.10б. Результаты моделирования 3.4 Электромагнитные процессы в системе ШИП-ДПТ Основным вариантом реверсивного ШИП с выходом на постоянном токе является мостовая схема (рис. 2.9), выполненная на четырёх транзисторных ключах ТК1-ТК4, шунтированных диодами. Каждый транзисторный ключ кроме выходных транзисторов содержит предвыходной каскад, блок защиты и управления. Все эти устройства не загружаются силовым током, протекающим через нагрузку. В дальнейшем рассматривается методика расчёта токов, протекающих только через выходные транзисторы и включённые встречно-параллельно им диоды. Электромагнитные процессы в нагрузке (якоре двигателя постоянного тока) при двухполярном выходном напряжении (симметричном управлении транзисторными ключами ШИП) изображены на рис. 3.11а, а при однополярном выходном напряжении (несимметричном и поочередном управлении) – на рис. 3.11б.
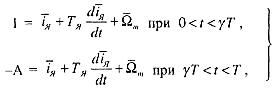
Рисунок 3.11. ЭлектромагнитныепроцессывсистемеШИП–ДПТ В квазиустановившемся режиме электромагнитные процессы в нагрузке описываются следующими дифференциальными уравнениями в относительных величинах:
где А = 1 при двухполярном выходном напряжении, А = 0 – при однополярным,
Среднее напряжение на выходе ШИП определяется из уравнений:
(3.9)
Из рис. 3.11 видно, что ток в якоре содержит среднюю
(гладкую) составляющую IЯср и пульсирующую составляющую
(3.10)
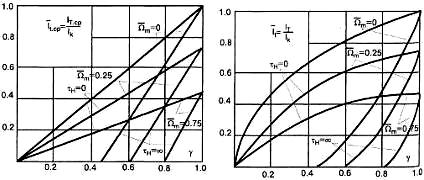
Уравнения (3.10) одновременно описывают и механические характеристики исполнительной машины, т. к. момент на валу определяется лишь гладкой составляющей тока, эти характеристики показаны на рис. 3.12, где в скобках указаны значения у для двухполярной модуляции. Как следует из (3.10) механические характеристики системы ШИП – двигатель
постоянного тока представляют собой семейство прямых с постоянным углом наклона
к оси абсцисс (рис. 3.12), пересекающих ось ординат при
Рисунок 3.12. Механические характеристики системы ШИП–ДПТ Таким образом, механические характеристики системы ШИП – двигатель постоянного тока аналогичны механическим характеристикам системы генератор – двигатель. Импульсное управление двигателем от ШИП практически не искажает естественных механических характеристик двигателя. Величина пульсирующей составляющей находится из решения системы уравнений (3.8); ее обобщенное выражение имеет вид:
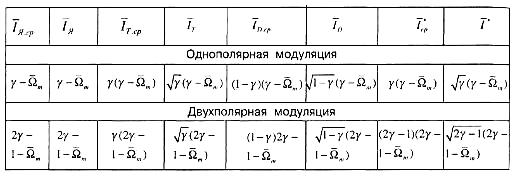
Средние и эффективные токи в якоре машины, в силовых транзисторах и диодах и в источнике питания могут быть определены по упрощенным выражениям, если принять, что мгновенный ток якоря изменяется по закону:
В этом случае выражения для определения относительных токов во всех отмеченных ветвях представлены в табл. 3.1. вал двигатель электропривод преобразователь Таблица 3.1
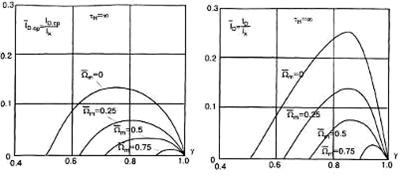
В качестве примера на рис. 3.13 а, б приведены зависимости относительных токов в силовых транзисторах и диодах для двухполярной модуляции, рассчитанные по выражениям табл. 3.1.
Рисунок 3.13а. Средние и эффективные токи в силовых транзисторах
Рисунок 3.13б. Средние и эффективные токи в силовых диодах Целью расчета и проектирования транзисторного ШИП является выбор способа управления, типа транзисторов и диодов, определение токов и мощности рассеяния и оптимальной частоты коммутации в ШИП. При выборе способа управления необходимо исходить из требований, предъявляемых к регулировочным и энергетическим характеристикам электропривода. Симметричное управление ШИП позволяет получить линейные регулировочные характеристики двигателя. Однако энергетические характеристики ШИП при этом способе управления ухудшены вследствие повышенных пульсаций тока в якоре и в полупроводниковых приборах. При несимметричном и поочерёдном управлении ШИП в регулировочной характеристике электропривода имеет место зона нечувствительности. Схемные способы уменьшения этой зоны ухудшают устойчивость электропривода. Энергетические характеристики ШИП с несимметричным и поочерёдным управлением лучше, чем у ШИП с симметричным управлением, так как пульсации тока здесь в два раза меньше. В паспортных данных силовых транзисторов и диодов обычно приводится допустимая рассеиваемая мощность, как с радиатором, так и без него. Поэтому определение мощности, рассеиваемой транзистором и диодом, может рассматриваться как конечный результат расчета. Заключение Результаты моделирования показывают, что переходной процесс по управлению в двигателе cпараллельным способом возбуждения несколько затянут по сравнению с двигателем с независимым возбуждением. Так же двигатель развивает меньший пусковой момент и имеет большую скорость холостого хода по сравнению с двигателем с независимым возбуждением. При пуске момент двигателя с последовательным возбуждением значительно превышает момент двигателя с независимым возбуждением и двигателя с параллельным возбуждением. Это достоинство двигателя широко используется в тяговых (подъемно-транспортных) электроприводах. Однако в двигателе с последовательным возбуждением при приложении нагрузки наблюдается значительный провал скорости. Сравнивая процессы в системах с ШИП с аналогичными процессами для непрерывных систем, можно сделать вывод о достаточно близком совпадении. Однако здесь, ШИП вносит свою специфику. Эта специфика проявляется в пульсации момента и в несколько измененных динамических свойствах системы. |

 (3.1)
(3.1)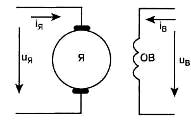
 (3.3)
(3.3)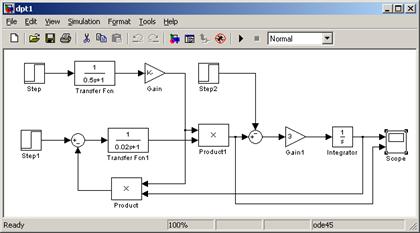
 (3.4)
(3.4)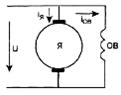
 (3.5)
(3.5)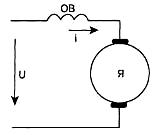
 (3.6)
(3.6) (3.7)
(3.7)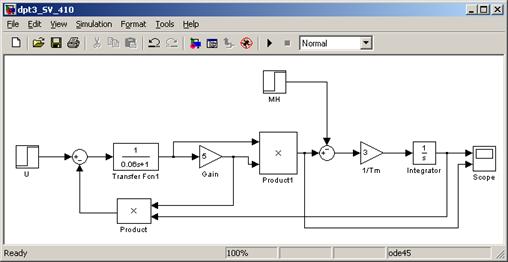
 (3.8)
(3.8)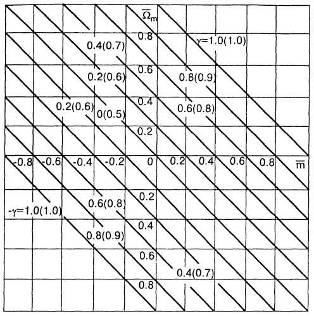

Страницы: 1, 2