|
|
МЕНЮ
|
Дипломная работа: Автоматизация узла получения оксиэтилированных алкилфеноловПрограммирование станции управления осуществляется на станции оператора. Соединение блока управления и модулей ввода-вывода. Таблица 15 – Заказная спецификация на электрическую и трубную проводки
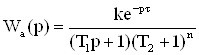
Связь шкафа РСУ CENTUM CS 3000 с информационно-командной станцией осуществляется с помощью кабеля V-сети YCB111. Все импульсные проводки выполнены из стальных бесшовных труб 14х2. Для облегчения монтажа и демонтажа, а также для проверки работоспособности измерительных преобразователей на импульсные линии установлены запорные шаровые вентили 14нж12 и 3-х вентильные блоки SVM -3S-W22-NB. Воздух на пневмопитание клапанов с давлением 1,4; 2,3; 2,8 кгссм2; время регулирования Тр,з £ 35 мин.; степень затухания переходного процесса 0.75 < y < 0.9; остаточное отклонение регулируемого параметра DQст,з = 0. Требуется: 1. Построить математическую модель объекта по его переходной характеристике. 2. Найти оптимальные значения настроечных параметров цифровых регуляторов при степени колебательности m = 0,336 и следующих значениях времени такта квантования: Tkw =0,5 мин; 0,9 мин; 2 мин. 3. Построить переходные процессы при нанесении следующих воздействий: по каналу управления – изменением задания регулятору на 0,1 кгсч; по каналу регулирующего органа – изменением расхода окиси этилена, которое по своему действию эквивалентно перемещению регулирующего органа на 10% хода. 4. Оценить качество работы цифровой АСР при различных значениях времени такта квантования и различных настройках регуляторов. 5. Выбрать регулятор и значения его настроечных параметров, которые обеспечивают заданное качество процесса регулирования при минимальных затратах на управление. 4. Построение математической модели объекта по экспериментальной переходной характеристике Задача построения математической модели включает в себя несколько этапов: 1. Выбор аппроксимирующей передаточной функции, дающей приемлемую модель объекта для проектирования АСР с типовыми регуляторами. 2. Определение параметров модели, обеспечивающих совпадение аппроксимируемой и аппроксимирующих переходных характеристик согласно выбранному критерию приближения. 3. Оценка точности аппроксимации Выбор вида аппроксимирующей передаточной функции Разработано большое количество методов аппроксимации экспериментальных данных отличающихся друг от друга структурой модели, критериями приближения, особенностью выполнения расчётов. Применим хорошо зарекомендовавший себя метод, согласно которому передаточная функция модели пишется в виде:
где Т1, T2, k, t – соответствующие постоянные времени, коэффициент передачи, запаздывание. n – показывает определяющий порядок знаменателя передаточной функции. Критерием приближения является требование совпадения аппроксимируемой h и аппроксимирующей ha характеристик в точках t = 0, t = ¥ и в точке перегиба. Кроме того, в точке перегиба эти характеристики должны иметь одинаковый наклон. Таким образом, критерий приближения имеет следующий вид:
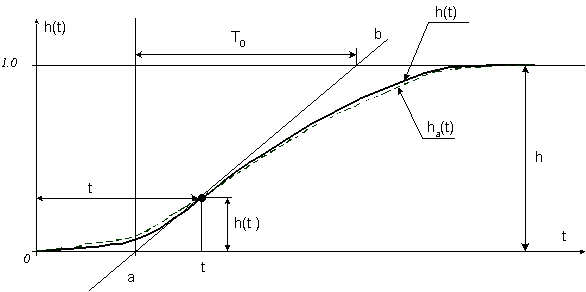
Для определения производной h’ переходной характеристики h в точке, где эта характеристика имеет максимальный наклон, проводится касательная и определяется длина отрезка Т0 заключённого между точкой этой касательной с горизонтальной осью и линией нового установившегося значения характеристики, то есть с линией hуст. Приняв значение:
критерий приближённости можно переписать следующим образом:
Это условие позволяет найти
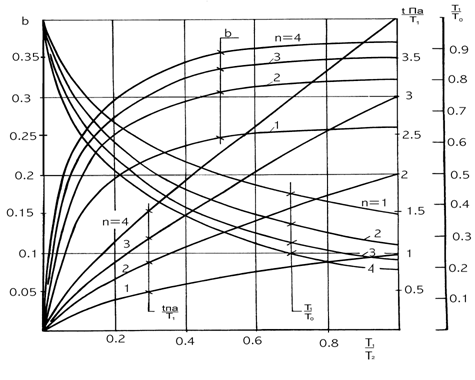
численные значения постоянных времени Тi, Расчёт параметров удобно производить при помощи номограммы.
Номограмма для определения параметров модели Порядок расчета следующий: 1. По переходной характеристике определяются исходные данные для аппроксимации. При помощи графика переходного процесса, полученной на производстве определили: установившееся значение переходной характеристики hуст = 1; значение в точке перегиба h = 0,321; время точки перегиба tп =6,6; время регулирования T0 = 10,0; 2. Находим величину b = Имеем b = При b = 0,321. Принимаем n = 2. 3. По таблицам определяем отношения и, следовательно, величины T1, T2 и t п.а. Имеем: Тогда: T1 = 0,325 × T0 = 0,325*10 = 3,25 мин; T2 = 0,75 × T1 = 0,75*3,25 = 2,43 мин; tп.а = 1,651 × T1 = 1,651*3,25= 5,36 мин. Поскольку tп > t п.а, находим
время запаздывания t = 6,6 – 5,36 = 1,24 мин. Найдем численное значение коэффициента передачи К, входящего в выражение для аппроксимирующей передаточной функции. Имеем где
С учетом найденных значений К, t, Т1, Т2, n аппроксимирующая передаточная функция запишется в виде:
При оценке точности аппроксимации в передаточной функции согласно и необходимо положить: К = 0,5; t = 1,24; Т = 3,25; a1 = 0,75; a2 = 0; n1 = 1; n2 = 2; n 3 = 0. Используя выше рассчитанные данные и приняв в расчёте величину возмущающего воздействия по каналу регулирования равным 10% хода регулирующего органа.
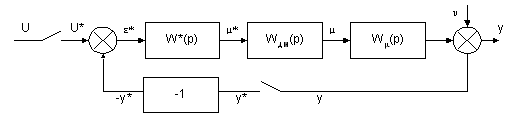
Аппроксимируемая и аппроксимирующая кривая Расчёт на ЭВМ переходной функции модели и сравнение её с заданной показывают, что модель адекватна реальному процессу. Максимальное отклонение друг от друга ординат аппроксимируемой и аппроксимирующей переходных характеристик не превышает 4%. 5. Расчет оптимальных настроечных параметров цифровых регуляторов Модель и расчетная схема цифровой АСР При исследовании систем с цифровыми регуляторами обычно вместо известной структурной схемы цифровой АСР с АЦП, ЦАП и ЦВУ рассматривают модель цифровой АСР и далее ее расчетную схему. Модель цифровой АСР В АЦП осуществляется преобразование непрерывного сигнала U, y в дискретную последовательность чисел U и y, где lt – дискретное время, t – такт квантования, l – номер такта квантования. При исследовании систем с цифровым регулятором перейдём от функциональной схемы к модели цифровой системы. В модели АЦП заменяют дельта импульсными модуляторами, а ЦАП входит как демодулятор. Демодулятор и объект образуют приведённую непрерывную часть системы с передаточной функцией: Wпнч=Wдн*Wm. Дельта импульсные модуляторы осуществляют преобразование сигналов U и y в синхронные импульсные последовательности U* и y* в соответствии со следующими формулами:
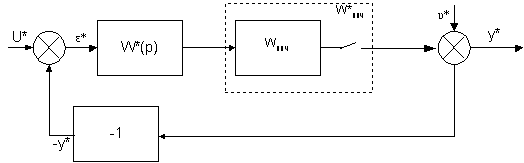
где U* и y* – модели сигналов. Структурная схема может быть представлена к расчётной.
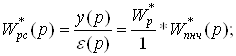
Расчётная схема состоит из дискретного регулятора W* и дискретного объекта с передаточной функцией W*пнч, а все сигналы представляются синхронной последовательностью моделированных d импульсов. Передаточная функция разомкнутой цифровой АСР запишется в виде:
Передаточная функция дискретной системы связана с передаточной функцией её непрерывной части следующим соотношением:
где wкв=2pТ=kр/Ти, k3Т=kрТg где: Kр – коэффициент передачи непрерывного ПИД-регулятора, Ти – время изодрома, Тg – время предварения. Передаточные функции вычислительных устройств цифровых регуляторов, определенные в смысле дискретного преобразования Лапласа, имеют вид: Запас устойчивости систем с цифровыми регуляторами. Оценка запаса устойчивости может проводиться с помощью корневого и частотного показателей колебательности. Примем к рассмотрению способ оценки запаса устойчивости по распределению корней характеристического уравнения замкнутой системы, который позволяет легко и просто выполнить вычисления на ЭВМ, границы заданного запаса устойчивости в пространстве параметров настройки регулятора по соотношениям, получающиеся из условия:
где m – заданный корневой показатель затухания свободных колебаний. При этом частота меняется в пределах от w =0 до w =pсм2. Время регулирования Тр = 34,1 мин < Тр.з = 35 мин. Степень затухания переходных процессов: По каналу управления y= 0,522= 0,81 Итак, рассчитанная АСР удовлетворяет требуемым показателям качества работы: динамическая ошибка и время регулирования не превышает заданных значений. Степень затухания y переходных процессов близка к расчётной. Статическая ошибка регулирования при исследовании ПИ-регулятора равна нулю. Заключение В разработанном дипломном проекте был проведен анализ узла получения оксиэтилированных алкилфенолов в цехе 2811 завода «Олигомеров» ОАО «Нижнекамснефтехим». В результате автоматизации узла получения оксиэтилированных алкилфенолов была осуществлена модернизация релейных схем управления на автоматизированную систему CENTUM CS 3000. При этом была полностью выполнена основная задача управления, которая состоит в обеспечении заданной степени превращения исходного вещества в конечный продукт с минимальными энергозатратами при обеспечении безаварийности и пожаровзрывобезопасности производства. Технические средства автоматизации как отечественных производителей так и зарубежных, используемые в процессе осуществляют свою функцию с требуемой для данного процесса точностью. Таким образом, автоматизация приводит к улучшению показателей данного процесса. Разработанная структура управления технологической установкой на базе CENTUM CS 3000 позволяет значительно улучшить и облегчить работу персонала, обеспечить качественное управление процессом, более полно и экономно использовать ресурсы. Список литературы 1. Баратов А.Н. Пожаровзрывоопасность веществ и материалов, и средств их тушения − М.: Химия, 1990, 394 с. 2. Дудников Е.Г., Казаков А.В. Автоматическое управление в химической промышленности: Учебник для ВУЗов – М.: Химия, 1987,368 с. 3. Голубятников В.А., Шувалов В.В. Автоматизация производственных процессов в химической промышленности. Учебник для техникумов. – 2-е изд., перераб. и доп. – М.: Химия, 1985. 4. Ицкович Э.Л. Микропроцессорные распределенные системы управления зарубежных фирм на рынке СНГ. Выпуск 4. − М.: 2002, 106 с. 5. Казаков А.В., Кулаков М.В., Мелюшев Ю.К. Основы автоматики и автоматизации химических производств. − М.: Машиностроение, 1970, 153 с. 6. Клюев А.С., Глазов Б.В., Дубровский А.Х., Клюев А.А. Проектирование систем автоматизации технологических процессов: Справочное пособие. – М.: Энергоатомиздат, 1990, 464 с. 7. Лапшенков Г.И., Полоцкий Л.М. Автоматизация производственных процессов в химической промышленности. Технические средства и лабораторные работы. Изд. 3-е, перераб. и доп. – М.: Химия, 1988,288 с. 8. Плюто В.П. и др. Практикум по теории автоматического управления химико-технологическими процессами. Цифровые системы. − М.: Химия, 1989, 168 с. 9. Полоцкий Л.М., Лапшенков Г.И. Автоматизация химических производств: Учебник для ВУЗов. – М.: Химия, 1982, 296 с. 10. Шкатов Е.Ф., Шувалов В.В. Основы автоматизации технологических процессов и производств. Учебник для техникумов. – М.: Химия, 1988 г., 304 с. 11. Безопасность и методы резервирования АСУТП. Методическое пособие / Казанский государственный технологический университет. Сост.: М.А. Харисов, Н.И. Ларионова. Казань, 2003. 84 с. 12. Нафиков Г.Ф. Безопасность жизнедеятельности. Методические указания. Казань, 2001, 24 с. 13. Экономическое обоснование дипломного проекта. Методические указания. Кислова В.И. 14. Цифровые АСР. Пример выполнения расчета в дипломных проектах и методические указания. 15. Технологический регламент цеха 2811. Завод «Олигомеров». ОАО «НКНХ». 16. Каталог продукции фирмы «Yokogawa». 17. Ларионова Н.И. Системы автоматизированного управления. Курс лекций. 18. Ларионова Н.И. Автоматизация технологических процессов и производств. Курс лекций. |
 ,
,